请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:LAUNCHTXL-F2.8069万M 主题中讨论的其他部件: BOOSTXL-DRV8305EVM, MOTORWARE
您好,
我正在尝试使用 LAUNCHTXL-F2.8069万M / BOOSTXL-DRV8305EVM旋转我的无刷电机TS X-802 (tenshock-motors.de/Tenshock-Brushless-Motor-6-Pole-TSTS-X-802-Car-Motor)。
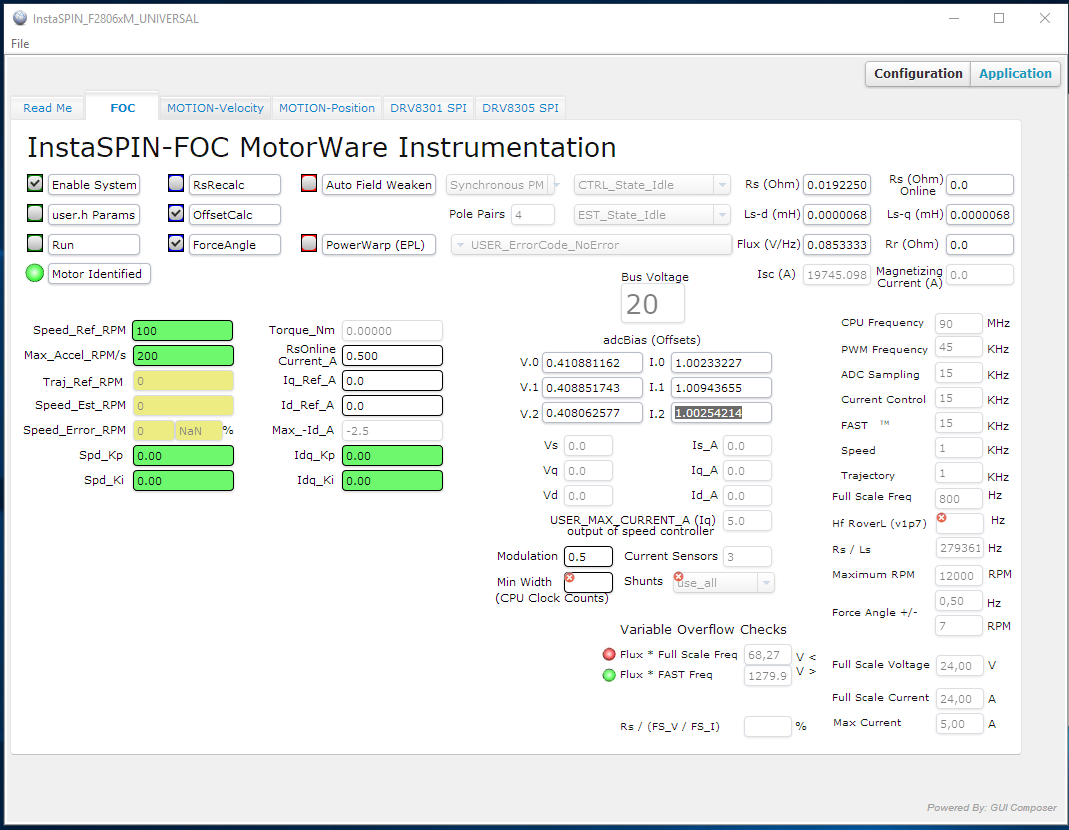
我使用C:\ti\motorware\motorware_1_01_00_18\sw\solutions\instaspin_motion\boards\bootxldrv8305_revA\F28x\f2806xM\projects\CCS\proj_lab05c项目2806项目和InstaSPIN_F2806xM_universal应用程序。
但电机不旋转。
我试过另一台马达,RS 536-6052 (uk.rs-online.com/.../) ,所有设备都能正常工作,都是同一个项目。
有没有人知道,电动机是否与本板配合使用? 如果是,我必须做什么才能使发动机运转? 或者是否有不同的板,该电机的工作原理是什么?
非常感谢,
Lukas