请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28.0048万C-Q1 各位专家,您好!
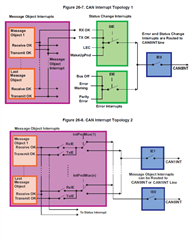
根据我链接到的线程,如何同时使用两个中断行?
在我的代码中,CANINT0用于检查传输数据包的TxOk状态,以便我知道我的消息是否成功传输。 我还想在CANINT1的全局中断接收到数据包时获取中断。 但是,当接收到消息对象时,我不会得到任何中断。 如何解决此问题?
下面是我的代码的几个部分:
void CAN_init(void)
{
//CAN initialization
CAN_initModule(CAN_BASE);
// Refer to the Driver Library User Guide for information on how to set
// tighter timing control. Additionally, consult the device data sheet
// for more information about the CAN module clocking.
//
CAN_setBitRate(CAN_BASE, DEVICE_SYSCLK_FREQ, 100000, 20);
// Enable CAN Interrupts
CAN_enableInterrupt(CAN_BASE, CAN_INT_IE1|CAN_INT_STATUS);
CAN_enableGlobalInterrupt(CAN_BASE, CAN_GLOBAL_INT_CANINT1);
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// Message Object ID Number: 1
// Message Identifier: 1
// Message Frame: CAN_MSG_FRAME_STD
// Message Type: CAN_MSG_OBJ_TYPE_RX
// Message ID Mask: 0
// Message Object Flags: CAN_MSG_OBJ_RX_INT_ENABLE
// Message Data Length: 8 Bytes
//
CAN_setupMessageObject(CAN_BASE, 1, 1, CAN_MSG_FRAME_STD,CAN_MSG_OBJ_TYPE_RX, 0, CAN_MSG_OBJ_RX_INT_ENABLE,8);
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// Message Object ID Number: 2
// Message Identifier: 2
// Message Frame: CAN_MSG_FRAME_STD
// Message Type: CAN_MSG_OBJ_TYPE_TX
// Message ID Mask: 0
// Message Object Flags: CAN_MSG_OBJ_TX_INT_ENABLE
// Message Data Length: 8 Bytes
//
CAN_setupMessageObject(CAN_BASE, 2, 2, CAN_MSG_FRAME_STD,CAN_MSG_OBJ_TYPE_TX, 0, CAN_MSG_OBJ_TX_INT_ENABLE,8);
CAN_setInterruptMux(CAN_BASE, 2); <-----------to use CANINT1 for msg obj 1
//
// Start CAN module operations
//
CAN_startModule(CAN_BASE);
};
CANINT1是我唯一启用的中断:
//
// This registers the interrupt handler in PIE vector table.
//
Interrupt_register(INT_CANB1, &ISR_can1);
//
// Enable the CAN-B interrupt signal
//
Interrupt_enable(INT_CANB1);
我使用以下代码验证传输是否成功:
bool canGetTxOkStatus(void)
{
uint16_t status;
status = CAN_getStatus(CAN_BASE);
if ( (status & CAN_STATUS_TXOK) == CAN_STATUS_TXOK)
{
return true;
}
else
{
return false;
}
}