Other Parts Discussed in Thread: TMDXIDDK379D, TMDSCNCD28379D, LAUNCHXL-F280025C, CONTROLSUITE, C2000WARE-MOTORCONTROL-SDK, C2000WARE, TMDSHVMTRINSPIN
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDXIDDK379D 主题中讨论的其他器件: TMDSCNCD28379D、 LAUNCHXL-F280025C、 controlSUITE、 C2000WARE-MOTORCONTROL-SDK、 C2000WARE、 TMDSHVMTRINSPIN
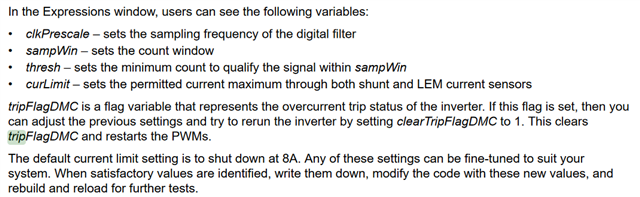
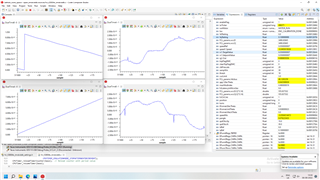
我 目前正在通过具有6个构建级别的 TMDXIDDK379D 控制 BLDC。 我在构建级别3上、前两个构建级别 已成功完成。 在第3级中,要求您调整 IdTesting、Iqtesting 和 speedref (参考文档: 使用快速电流环路对 PMSM 进行快速响应控制) 触发此标志的默认电流值设置为8A、 IdTesting = 0、IqTesting = 0.03和 Speedref = 0.3、已设置。
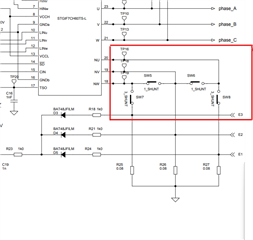
我在构建级别3中遇到的问题是 、当我将电机变量"runmot电机"变为电机运行时、TripFlagDMC 会触发关断。 但电源的电流消耗约为1A、远低于8A 的阈值。
我不明白是什么会触发该标志、也找不到用于监控 LEM 电流感应模块的表达式。
控制器板 - TMS320F280049C
2个逆变器板- ST 评估板(STEVAL-IPM07F)
电机- BLDC - DPN57BLS94.004
谢谢你