Other Parts Discussed in Thread: DRV8301, MOTORWARE, DRV8316
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 主题中讨论的其他器件:DRV8301、 MOTORWARE、 DRV8316
您好!
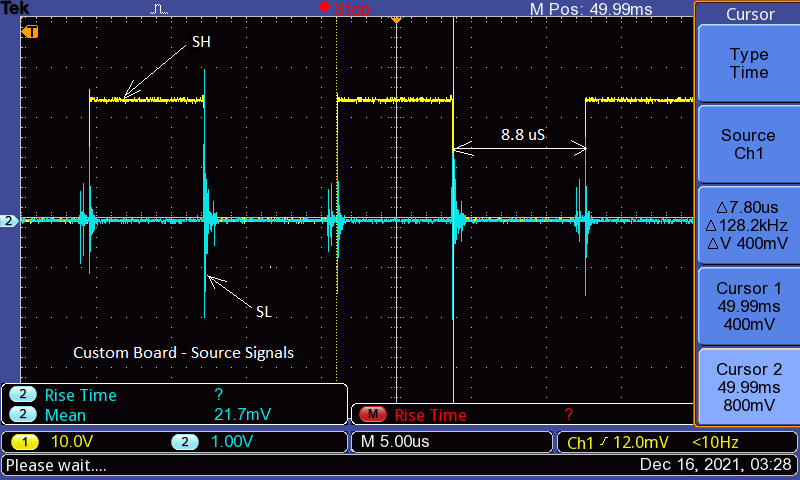
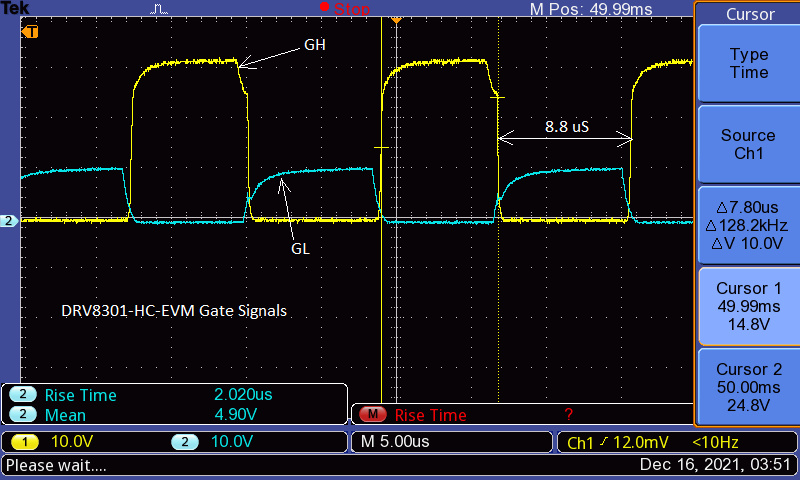
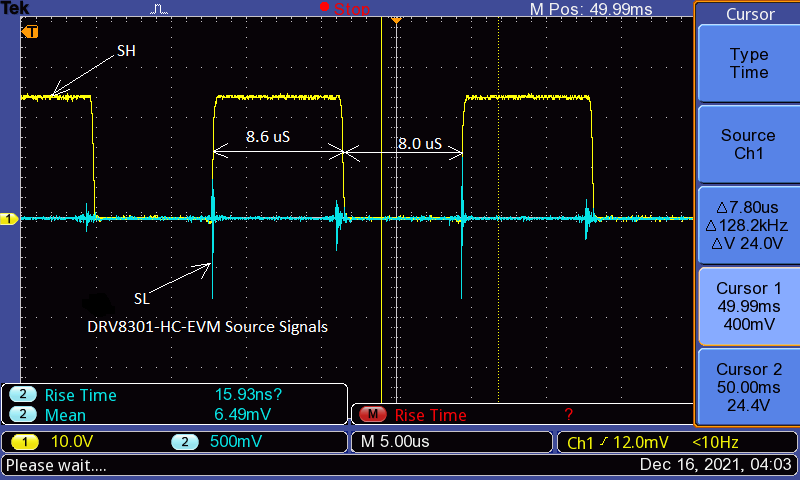
我将查看我们自己的电路板设计、主要基于 DRV8301-HC-EVM Rev D。我将通过 Insta-Spin 实验室进行介绍。
我已经使用评估套件完成了大部分实验。 我可以毫无问题地运行实验01b -速度甚至可以非常接近设置点。
当我关闭电流环路时、我的问题就会开始。 该电机非常不稳定、并且一次只会在一定的时间内旋转一圈。
几分钟后、它也变得非常热。 (这可能是相关的、也可能不是相关的、但我在 SPI 总线上没有看到太多活动
微控制器和 DRV8301。 芯片选择线路在3ms 内变为低电平、但我看不到正在传输的任何数据。) 实验01C 表面上是这样
用于验证信号链完整性。 但是、在实验中、没有提供有关电机不能正常旋转时该怎么办的线索。 具体而言
在这种情况下、是指"信号链完整性"、如果信号链的完整性受到损害或损坏、或者存在一些错误、
我应该如何对其进行故障排除、以便能够隔离负责的链路中的"链路"?
谢谢、
Dave