

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28030 大家好、TI 的工程师!
我正在调试 HVPM_Enhanced_Sensorless_2803x 项目。 我在调试过程中遇到了一些问题、希望能得到您的帮助。
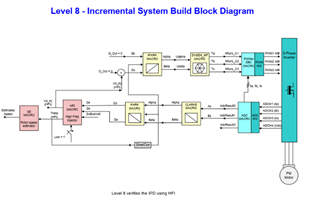
Q1:我已经阅读了 HVPM_Enhanced_Sensorless_2803x 项目的 DOC 文档、但是、我无法很好地理解构建级别8的正确实验现象。
这是我的理解:在变量 lsw 被设定为1之后、如果我旋转电机转子、变量 hfi1.thetaEst 将随着转子的位置而改变、并且应该输出一个三角波、就像电机位置传感器显示的波形。
然而、当我旋转电机转子时、变量 hfi1.thetaEst 只会轻微波动、并且不会随电机转子的变化而变化。
这是正确的实验现象还是 HFI 参数未正确调整? 如果我错了、正确的实验现象是什么?
Q2:如果 HFI 参数未 正确调整、应调整哪些参数以及如何调整这些参数?
电机参数:Motor_Poles=3,Motor_Rs=0.015Ω,Motor_LD=0.000313H、Motor_LQ=0.000756H、VDC=24V。
我的程序参数如下所示:
define VOLT_PU (A)_IQ (A/(sqrt (3)* base_voltage)// (sqrt (3)* base_voltage)=24V
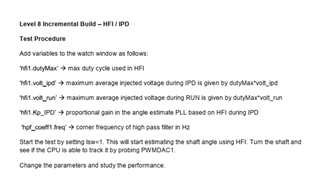
#define HFI_VOLT_RUN 3.0 /*低于此 Vdc (以 V 为单位)@RUN */
#define HFI_VOLT_IPD 4.0/*低于此 Vdc (以 V 为单位)@IPD *的最大占空比
// HFI 幅度(占空比)参数
Hfi1. KP_IPD =_IQ (8.0);
Hfi1. KP_RUN =_IQ (20.0);
hfi1.base_wTS =_IQ (200*T);
hfi1.TS =_IQ (T);
Hfi1. DutyMax =_IQ (0.65);
hfi1.volt_ipd = VOLT_PU (HFI_VOLT_IPD);
hfi1.volt_run = volt_pu (hfi_volt_run);
// HFI 频率(时序)参数
hfi1.Squar_PRD_SET = 1;对于 Bosch、//16 IPD // 8低速//对于电动自行车、则为*/
hfi1.hfi_Time1 = 300;// 400
hfi1.hfi_Time2 = 400;// 450
//初始化 HPF 参数
HPF_coeff1。 FREQ =_IQ (18.0);
HPF_coeff1.pit =_IQ (PI*T);
HPF_init (&hpf_coeff1);
//初始化 NS 确定参数
ns_ID1.cntON = 1; //下面 cntPRD 内的导通脉冲数
ns_ID1.cntPRD = 30; //每个开关状态的脉冲周期
NS_ID1.PWM_ch[0]= 1; // epwm1
NS_ID1.PWM_ch[1]= 2; // epwm2
NS_ID1.PWM_ch[2]= 3; // epwm3
NS_ID1.PWM_PeriodMax = PWM_state.PeriodMax;
附上我所阅读的一些文件。
期待您的回复!
