请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280049C 主题中讨论的其他器件: C2000WARE、 TMDSHVMTRINSPIN
大家好、
我们正在使用 TMS320F280049C 开发基于传感器的 FOC。
我使用 的是示例项目路径: C:\ti\c2000Ware_MotorControl_SDK_3_00_01_00\solutions\tmdshvmtrinspin\f28004x\ccs\sensorless_foc\is10_rs_recalcc
我们使用 HVKIT 和 AC 伺服电机测试了实验10示例、它按预期工作。
套件: tmdshvmtrinspinspinsp(HVKIT)
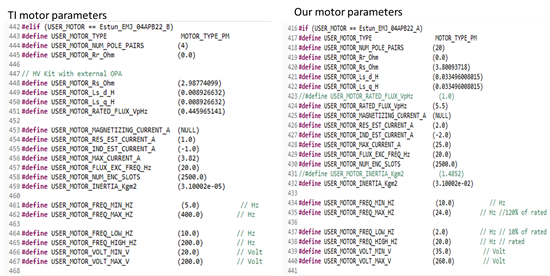
电机:交流伺服电机。 参数定义如下。
#elif (USER_MOTOR == Estun_EMJ_04APB22_B) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_Rr_Ohm (0.0) // HV Kit with external OPA #define USER_MOTOR_Rs_Ohm (2.98774099) #define USER_MOTOR_Ls_d_H (0.008926632) #define USER_MOTOR_Ls_q_H (0.008926632) #define USER_MOTOR_RATED_FLUX_VpHz (0.445965141) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (3.82) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR_INERTIA_Kgm2 (3.10002e-05) #define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz #define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz #define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz #define USER_MOTOR_VOLT_MIN_V (20.0) // Volt #define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
现在、我们需要使用 HVKIT 和 PMSM 电机(自定义电机)测试相同的实验10示例、并使用波峰值参数。
套件: tmdshvmtrinspinspinsp(HVKIT)
电机:PMSM 电机(定制电机)。 参数定义如下。
#if (USER_MOTOR == Estun_EMJ_04APB22_B) #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (20) #define USER_MOTOR_Rr_Ohm (0.0) #define USER_MOTOR_Rs_Ohm (NULL) //#define USER_MOTOR_Rs_Ohm (3.80093718) #define USER_MOTOR_Ls_d_H (NULL) #define USER_MOTOR_Ls_q_H (NULL) #define USER_MOTOR_RATED_FLUX_VpHz (0.0) #define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR_RES_EST_CURRENT_A (1.0) #define USER_MOTOR_IND_EST_CURRENT_A (-1.0) #define USER_MOTOR_MAX_CURRENT_A (7.4) #define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0) #define USER_MOTOR_NUM_ENC_SLOTS (2500.0) #define USER_MOTOR_INERTIA_Kgm2 (3.10002e-02) #define USER_MOTOR_FREQ_MIN_HZ (10.0) // Hz #define USER_MOTOR_FREQ_MAX_HZ (48.0) // Hz 120%of rated //increased to 48 from 30 #define USER_MOTOR_FREQ_LOW_HZ (4.0) // Hz //increased to 4 from 2.5 #define USER_MOTOR_FREQ_HIGH_HZ (40.0) // Hz //increased to 40 ffrom 25 #define USER_MOTOR_VOLT_MIN_V (35.0) // Volt #define USER_MOTOR_VOLT_MAX_V (260.0) // Volt
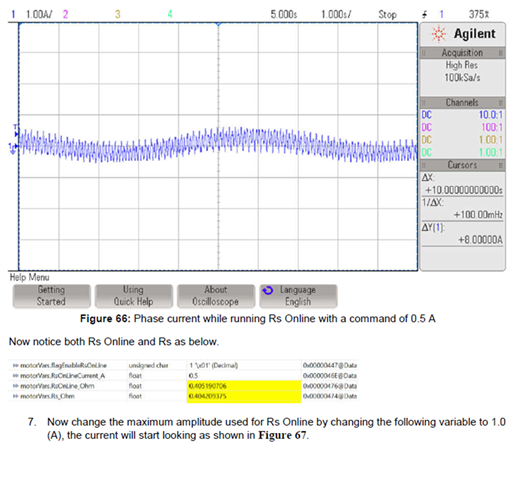
我是否可以使用相同的过程来测试我们的应用? 这是否按预期工作、或者我是否需要更改程序? 因为我们需要在终端应用中使用该电阻校准。
帮助我解决问题
提前感谢。