请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSHVMTRINSPIN 主题中讨论的其他器件:TMS320F280049C、 C2000WARE
大家好、团队成员
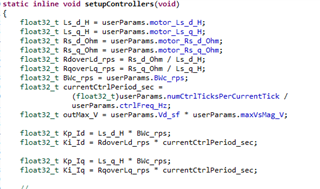
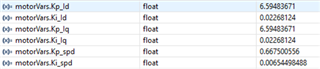
我们使用的是 TMS320F280049C 控制器和 TI 提供的无传感器 FOC 代码文件("C:\ti\c2000Ware_MotorControl_SDK_3_00_01_00\solutions\tmdshvmtrinaus\f28004x\ccs\sensorless_foc")
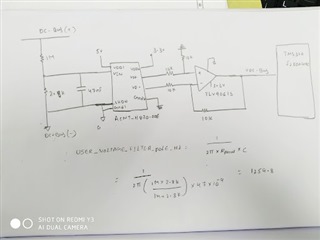
我们设计了具有三相输入电源的 HV-kit,可生成800Vdc 总线,我们使用的电机开关具有260V 电压和 7.4A 电流,FOC 库是否支持我的应用?
1.我们需要控制电机的速度,如何控制?
2.为了控制速度,我需要更改哪些参数(注: 我们熟悉 motorVars.speedRefHz)如何控制逆变器的输出电压?