

Other Parts Discussed in Thread: TMDSCNCD280049C
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28375D 主题中讨论的其他器件:TMDSCNCD280049C
早上好。
我目前正在使用 F28375D 实施 PFC。
我试图抑制过零点处的电流尖峰。
参考文献如下。
ttplpfc_F28004x 固件。
2.请参阅"如何降低图腾柱 PFC 交流过零时的电流尖峰"
https://www.ti.com/lit/slyt650
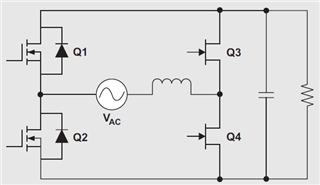
该电路如下所示。
它类似于上述文档的"图3"。
电感器:25mH
交流电压:220VAC 单相
输出电压:390Vdc
输出功率:30W
6、开关:DMN60H3D5SK3 (Q1、Q2、Q3、Q4)
开关频率:50kHz
死区时间:500ns
过零处理程序如下所示。 (指 ttplpfc_F28004x 固件)
static inline void grid_pwm_update(float32 invDuty)
{
volatile int16 softDeadBand;
volatile Uint16 db_tmp;
switch(zcp.zc_position)
{
case zc_normalOperation:
//Negative to Positive Zero-Crossing
// if((grid_invSine < GRID_PWM_PZC2) && (grid_invSinePrev < 0))
if((grid_invSine >= 0) && (grid_invSinePrev < 0))
{
zcp.zc_position = zc_positiveZeroCrossing1;
invDuty = 0.004f;
EPwm8Regs.DBCTL.bit.OUT_MODE = DBCTL_OUT_MODE_DIRECT;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_curr_ref_prev = 0.00f;
}
//Positive to Negativ Zero-Crossing
// else if((grid_invSine > GRID_PWM_NZC2) && (grid_invSinePrev > 0))
else if((grid_invSine <= 0) && (grid_invSinePrev > 0))
{
zcp.zc_position = zc_negativeZeroCrossing1;
invDuty = 0.004f;
EPwm8Regs.DBCTL.bit.OUT_MODE = DBCTL_OUT_MODE_DIRECT;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_curr_ref_prev = 0.00f;
}
break;
///////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////// Positive Cycle /////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
case zc_positiveZeroCrossing1:
// grid_pwm_slew++;
// EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
// EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
// invDuty = 0.004f;
invDuty = 0.004f;
if(grid_invSine >= 0)
{
zcp.zc_position = zc_positiveZeroCrossing2;
// grid_pwm_softstart = 0.0f;
}
break;
case zc_positiveZeroCrossing2:
// grid_pwm_slew++;
invDuty = 0.004f;
if(grid_invSine > GRID_PWM_PZC2)
{
zcp.zc_position = zc_positiveZeroCrossing3;
grid_pwm_slew = CLR;
grid_pwm_softstart = CLR;
EPwm7Regs.DBCTL.bit.OUTSWAP = DBCTL_OUTSWAP_APATH_A_BPATH_B; //Swap하지 않음
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_pfc_gi.Ki = 0;
}
break;
case zc_positiveZeroCrossing3:
grid_pwm_slew++;
if(fabsf(invDuty) < 0.02f)
{
if(invDuty > 0) invDuty = 0.02f;
else invDuty = -0.02f;
}
/*
if(fabsf(invDuty) < 0.004f)
{
if(invDuty > 0) invDuty = 0.004f;
else invDuty = -0.004f;
}
*/
grid_pwm_softstart = grid_pwm_softstart + GRID_PWM_SOFT_GAIN;
softDeadBand = GRID_PWM_PERIOD - grid_pwm_softstart;
db_tmp = GRID_PWM_DB;
if(softDeadBand < db_tmp) softDeadBand = GRID_PWM_DB;
EPwm7Regs.DBFED.bit.DBFED = softDeadBand;
// if((grid_pwm_slew > 3) && (grid_invSine > 0))
if((grid_pwm_slew > GRID_PWM_SOFT_COUNT) && (grid_invSine > 0))
{
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_pfc_gi.Ki = GRID_PFC_GI_PI_KI;
zcp.zc_position = zc_positiveHalf;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_DB;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_DB;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_HIGH;
grid_pwm_slew = CLR;
}
break;
case zc_positiveHalf:
// grid_pwm_slew++;
// EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
// EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_HIGH;
// EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_DB;
if((grid_invSine < GRID_PWM_NZC1) || (grid_invSine <= 0))
{
zcp.zc_position = zc_negativeZeroCrossing1;
invDuty = 0.004f;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
}
break;
///////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////// Negative Cycle /////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
case zc_negativeZeroCrossing1:
// grid_pwm_slew++;
// EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
// EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
// invDuty = 0.004f;
invDuty = 0.004f;
if(grid_invSine <= 0)
{
zcp.zc_position = zc_negativeZeroCrossing2;
}
break;
case zc_negativeZeroCrossing2:
// grid_pwm_slew++;
invDuty = 0.004f;
if(grid_invSine < GRID_PWM_NZC2)
{
zcp.zc_position = zc_negativeZeroCrossing3;
grid_pwm_slew = CLR;
grid_pwm_softstart = CLR;
EPwm7Regs.DBCTL.bit.OUTSWAP = DBCTL_OUTSWAP_APATH_B_BPATH_A; //OutA, OutB Swap
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_pfc_gi.Ki = 0;
}
break;
case zc_negativeZeroCrossing3:
grid_pwm_slew++;
if(fabsf(invDuty) < 0.004f)
{
if(invDuty > 0) invDuty = 0.004f;
else invDuty = -0.004f;
}
grid_pwm_softstart = grid_pwm_softstart + GRID_PWM_SOFT_GAIN;
// grid_pwm_softstart = grid_pwm_softstart + 200;
softDeadBand = GRID_PWM_PERIOD - grid_pwm_softstart;
db_tmp = GRID_PWM_DB;
if(softDeadBand < db_tmp) softDeadBand = GRID_PWM_DB;
EPwm7Regs.DBFED.bit.DBFED = softDeadBand;
if((grid_pwm_slew > GRID_PWM_SOFT_COUNT) && (grid_invSine < 0))
{
grid_pfc_gi.i10 = 0;
grid_pfc_gi.i6 = 1;
grid_pfc_gi.Ki = GRID_PFC_GI_PI_KI;
zcp.zc_position = zc_negativeHalf;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_DB;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_DB;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_HIGH;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
grid_pwm_slew = CLR;
}
break;
case zc_negativeHalf:
// grid_pwm_slew++;
// EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_HIGH;
// EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
// EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_DB;
if((grid_invSine > GRID_PWM_PZC1) || (grid_invSine >= 0))
{
zcp.zc_position = zc_positiveZeroCrossing1;
invDuty = 0.004f;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
}
break;
case zc_defaultState:
invDuty = 0.01f;
EPwm8Regs.DBCTL.bit.OUT_MODE = 0;
EPwm8Regs.AQCSFRC.bit.CSFA = AQCSFRC_OUT_LOW;
EPwm8Regs.AQCSFRC.bit.CSFB = AQCSFRC_OUT_LOW;
EPwm7Regs.DBRED.bit.DBRED = GRID_PWM_PERIOD;
EPwm7Regs.DBFED.bit.DBFED = GRID_PWM_PERIOD;
EPwm7Regs.AQCTLA.bit.CAU = TBCTR_CMP_OUTPUT_LOW;
EPwm7Regs.AQCTLA.bit.CAD = TBCTR_CMP_OUTPUT_TOGGLE;
EPwm7Regs.AQCTLA.bit.ZRO = TBCTR_CMP_OUTPUT_HIGH;
computeDF22_NotchFltrCoeff(&grid_notch1, (float32)(GRID_PWM_FREQ), (float32)(grid_freq_now*2.0) , 0.25f, 0.00001f);
computeDF22_NotchFltrCoeff(&grid_notch2, (float32)(GRID_PWM_FREQ), (float32)(grid_freq_now*2.0) , 0.25f, 0.00001f);
if(Device_Operation == START)
{
zcp.zc_position = zc_normalOperation;
grid_close_loop = START;
grid_close_loop_first_time = SET;
}
break;
default:
zcp.zc_position = zc_defaultState;
}
invDuty = (float32)EPwm7Regs.TBPRD * fabsf(invDuty);
if(invDuty == EPwm7Regs.TBPRD)
{
invDuty = invDuty - 1;
}
EPwm7Regs.CMPA.bit.CMPA = invDuty;
}
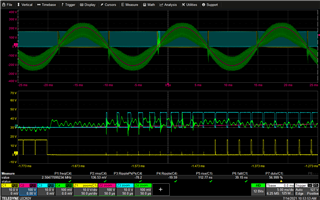
随附的波形是 AC150V 输入和320Vdc 输出的波形。
AC180V 或更高电压、390Vdc 输出使 Spike 更大并断开仿真器。
并发生由 SDFM 连接的 AMC1304M25DW 故障。(用于交流电压测量)
此外、FET 将损坏。
您有什么建议吗?
下面是其当前状态的波形。
基本 配置
2. 50kHz Vgs 波形
C1 (黄色):Q3 Vgs // C3 (蓝色):Q4 Vgs
C2 (紫色):交流电压 // C4 (绿色):交流电流
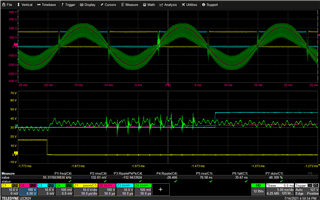
3.线路频率波形
C1 (黄色):Q1 Vgs // C3 (蓝色):Q2 Vgs
C2 (紫色):交流电压 // C4 (绿色):交流电流
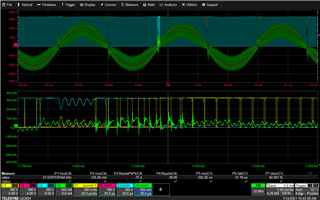
VDS 波形
C1 (黄色):Q3 Vds // C3 (蓝色):Q4 Vds
C2 (紫色):交流电压 // C4 (绿色):交流电流
如果您需要更多信息、请告诉我。
谢谢你。
