

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28379D 主题中讨论的其他器件:C2000WARE
您好!
我正在将 SPI 编码 器(IC-Haus MU150)集成到 LaunchPAD-F28379D 中
我下载了 C2000Ware 并修改了 SPI 示例项目3 "spi_ex3_external_loopback _fifo_interrupts.c"
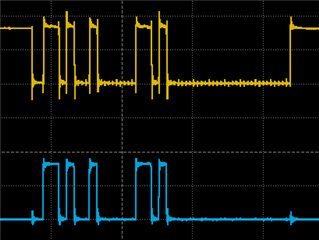
在调试控制台和示波器测量中、我看到编码 器 SOMI (黄色)在 SIMO 线路中回显、并且不会发回任何有用的数据
此外、SPISTEB 引脚似乎保持下拉状态而不产生任何信号。
这是我使用的代码
#include "driverlib.h"
#include "device.h"
/* MU150 masks */
#define MU150_OP_SDAD 0xA6
#define MU150_OP_REG_STATUS_DATA 0xAD
#define MU150_OP_WRITE_REG 0xD2
#define MU150_STATUS_VALID 0x01
#define MU150_SDAD_VALID 0x00
#define MU150_OP_READ_REG 0x97
#define MU150_ADDR_ACC_STAT 0x0D
#define MU150_ACC_STAT_BIT (0x01 << 7U)
#define MU150_ADDR_STATUS0 0x76
#define MU150_AM_MIN_BIT (0x01 << 0U)
#define MU150_AM_MAX_BIT (0x01 << 1U)
#define MU150_AN_MIN_BIT (0x01 << 2U)
#define MU150_AN_MAX_BIT (0x01 << 3U)
#define MU150_NON_CTR_BIT (0x01 << 3U)
#define MU150_EPR_ERR (0x01 << 6U)
#define MU150_ADDR_STATUS1 0x77
#define SPI_PACKET_SIZE (4U)
#define MU150_ADDR_FILT 0x0e
#define MU150_FILT1 0x01
#define MU150_FILT3 0x03 // 27dB
#define MU150_FILT4 0x04 // 39dB
#define MU150_FILT5 0x05 // 45dB
//
// Globals
//
volatile uint16_t sData[4]; // Send data buffer
volatile uint16_t rData[4]; // Receive data buffer
volatile uint16_t rDataPoint = 0; // To keep track of where we are in the
volatile uint16_t exe_rx = 0;
volatile uint16_t exe_tx = 0; // data stream to check received data
//
// Function Prototypes
//
void initSPIBMaster(void);
void initSPIASlave(void);
void configGPIOs(void);
__interrupt void spibTxFIFOISR(void);
__interrupt void spibRxFIFOISR(void);
//
// Main
//
void main(void)
{
uint16_t i;
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pullups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Interrupts that are used in this example are re-mapped to ISR functions
// found within this file.
//
Interrupt_register(INT_SPIB_TX, &spibTxFIFOISR);
Interrupt_register(INT_SPIB_RX, &spibRxFIFOISR);
//
// Configure GPIOs for external loopback.
//
configGPIOs();
//
// Set up SPI B as master, initializing it for FIFO mode
//
initSPIBMaster();
//
// Set up SPI A as slave, initializing it for FIFO mode
//
//initSPIASlave();
//
// Initialize the data buffers
//
//sData[0] = MU150_OP_WRITE_REG;
// sData[1] = MU150_ADDR_ACC_STAT;
// sData[2] = MU150_ACC_STAT_BIT;
sData[0] = MU150_OP_WRITE_REG;
sData[1] = MU150_ADDR_ACC_STAT;
sData[2] = MU150_ACC_STAT_BIT;
sData[3] = 0;
rData[0]=0;
rData[1]=0;
rData[2]=0;
rData[3]=0;
//
// Enable interrupts required for this example
//
Interrupt_enable(INT_SPIB_TX);
Interrupt_enable(INT_SPIB_RX);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
sData[0] = 0xA6;
sData[1] = 0;
sData[2] = 0;
sData[3] = 0;
//
// Loop forever. Suspend or place breakpoints to observe the buffers.
//
while(1)
{
;
}
}
//
// Function to configure SPI B as master with FIFO enabled.
//
void initSPIBMaster(void)
{
//
// Must put SPI into reset before configuring it
//
SPI_disableModule(SPIB_BASE);
//
// SPI configuration. Use a 500kHz SPICLK and 16-bit word size.
//
SPI_setConfig(SPIB_BASE, DEVICE_LSPCLK_FREQ, SPI_PROT_POL0PHA0,
SPI_MODE_MASTER, 500000, 32);
SPI_disableLoopback(SPIB_BASE);
SPI_setEmulationMode(SPIB_BASE, SPI_EMULATION_FREE_RUN);
//
// FIFO and interrupt configuration
//
SPI_enableFIFO(SPIB_BASE);
SPI_clearInterruptStatus(SPIB_BASE, SPI_INT_TXFF);
SPI_clearInterruptStatus(SPIB_BASE, SPI_INT_RXFF);
SPI_setFIFOInterruptLevel(SPIB_BASE, SPI_FIFO_TX1, SPI_FIFO_RX1);
SPI_enableInterrupt(SPIB_BASE, SPI_INT_TXFF);
SPI_enableInterrupt(SPIB_BASE, SPI_INT_RXFF);
//
// Configuration complete. Enable the module.
//
SPI_enableModule(SPIB_BASE);
}
//
// Configure GPIOs for external loopback.
//
void configGPIOs(void)
{
//
// This test is designed for an external loopback between SPIA
// and SPIB.
// External Connections:
// -GPIO25 and GPIO17 - SPISOMI
// -GPIO24 and GPIO16 - SPISIMO
// -GPIO27 and GPIO19 - SPISTE
// -GPIO26 and GPIO18 - SPICLK
//
//
// GPIO17 is the SPISOMIA.
//
//
// GPIO25 is the SPISOMIB.
//
GPIO_setMasterCore(64, GPIO_CORE_CPU1);
GPIO_setPinConfig(GPIO_64_SPISOMIB);
GPIO_setPadConfig(64, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(64, GPIO_QUAL_ASYNC);
//
// GPIO24 is the SPISIMOB clock pin.
//
GPIO_setMasterCore(63, GPIO_CORE_CPU1);
GPIO_setPinConfig(GPIO_63_SPISIMOB);
GPIO_setPadConfig(63, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(63, GPIO_QUAL_ASYNC);
//
// GPIO27 is the SPISTEB.
//
GPIO_setMasterCore(66, GPIO_CORE_CPU1);
GPIO_setPinConfig(GPIO_66_SPISTEB);
GPIO_setPadConfig(66, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(66, GPIO_QUAL_ASYNC);
//
// GPIO26 is the SPICLKB.
//
GPIO_setMasterCore(65, GPIO_CORE_CPU1);
GPIO_setPinConfig(GPIO_65_SPICLKB);
GPIO_setPadConfig(65, GPIO_PIN_TYPE_PULLUP);
GPIO_setQualificationMode(65, GPIO_QUAL_ASYNC);
}
//
// SPI A Transmit FIFO ISR
//
__interrupt void spibTxFIFOISR(void)
{
uint16_t i;
//
// Send data
//
for(i = 0; i < 4; i++)
{
SPI_writeDataNonBlocking(SPIB_BASE, sData[i]);
}
//exe_tx++;
//
// Increment data for next cycle
//
//
// Clear interrupt flag and issue ACK
//
SPI_clearInterruptStatus(SPIB_BASE, SPI_INT_TXFF);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP6);
}
//
// SPI B Receive FIFO ISR
//
__interrupt void spibRxFIFOISR(void)
{
uint16_t i;
//
// Read data
//
for(i = 0; i < 4; i++)
{
rData[i] = SPI_readDataNonBlocking(SPIB_BASE);
}
//exe_rx++;
//
// Check received data
//
//
// Clear interrupt flag and issue ACK
//
SPI_clearInterruptStatus(SPIB_BASE, SPI_INT_RXFF);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP6);
}
//
// End of File
//
有人可以帮助我发现这方面的错误吗? 使用中断可能会产生错误的逻辑流程?
谢谢
Hansol
