主题中讨论的其他器件:TMS320F28069

你(们)好。
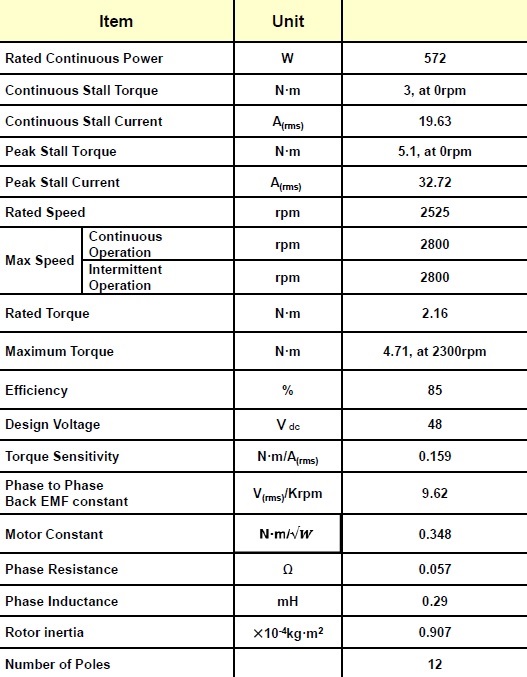
我将 F28388D 与应用结合使用、该应用基于电机控制库构建3示例。
以下是电机参数和配置
#define CGND HOT // COLD
#define BUILDLEVEL FCL_LEVEL3
#define SAMPLING_METHOD SINGLE_SAMPLING // double_SAMPLING //
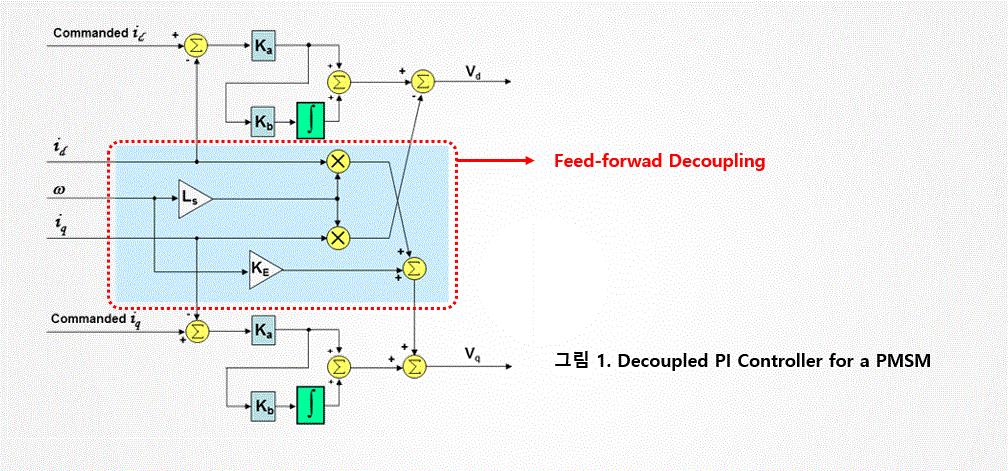
#define FCL_CNTLR PI_CNTLR // CMPLX_CNTLR //
#define CURRENT_SENSE SHUNT_CURRENT_SENSE //SD_CURRENT_SENSE // LEM_CURRENT_SENSE //
#define RS 0.113 //定子电阻(欧姆)
#define RR NULL //转子电阻(欧姆)
#define LS 0.000374 //定子电感(H)
#define LR NULL //转子电感(H)
#define LM 空 //磁化电感(H)
define 磁通0.962 // BEMF 常数(V/Hz)
#define 极点12. //极数
#define ENC_SLOTS 65536 //编码器中的插槽数
#define M_ID_START 0.04 //对齐基准 d 轴电流,0.06->8A 注入
#define M_IQ_LI5 0.04 //对于 LEVEL5、基准 q 轴电流
#define M_IQ_LN5 0.00/*0.04*/ //参考 q 轴电流,无 LEVEL5
//
//定义基本数量
//
#define BASE_VOLTAGE 38.1 // 66/sqrt (3)= 38.1 by Alex //38.1 //236.14 //基峰值相电压(伏)、Vdc/sqrt (3)
#define BASE_SHUNT_CURRENT 47.4 //基峰值相电流(安培)、
//最大 可测量峰值电流。
#define CURRENT_LIMIT 36.0 //36.0
#define BASE_LEM_CURRENT 12.0 //--- 执行----
#define base_扭 矩 //基体扭矩(N.m)
#define base_flux //基础磁通连杆(volt.sec/rad)
#define BASE_FREQ 250 //基本电气频率(Hz)
// rpm = 120*Base_freq/极
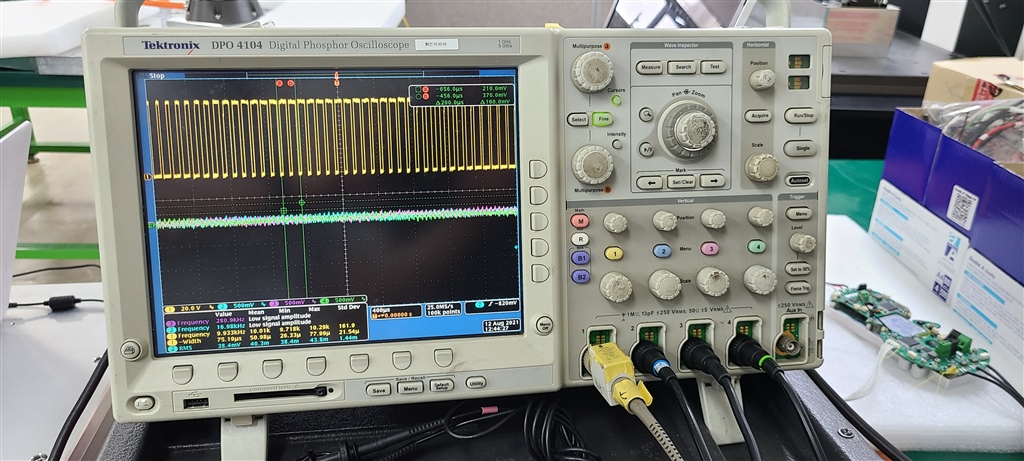
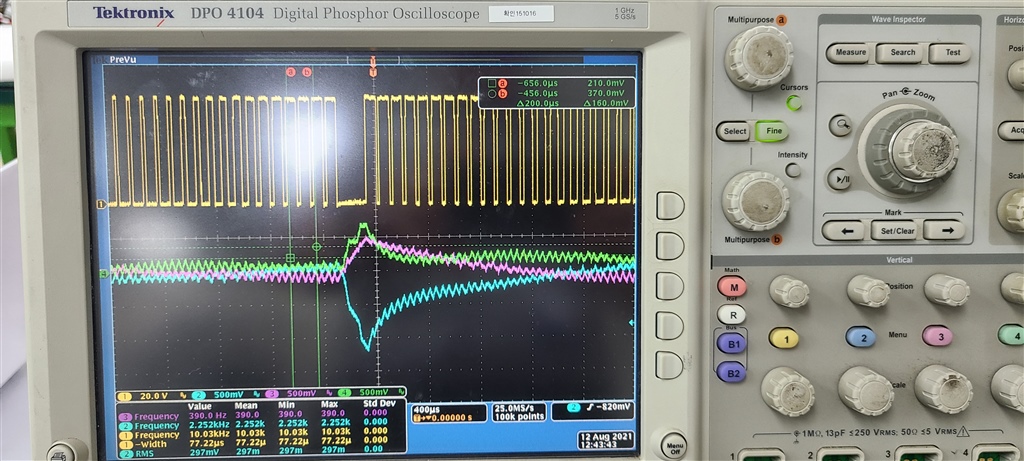
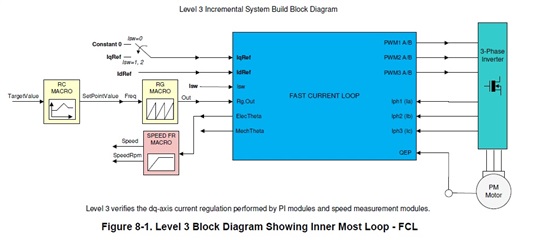
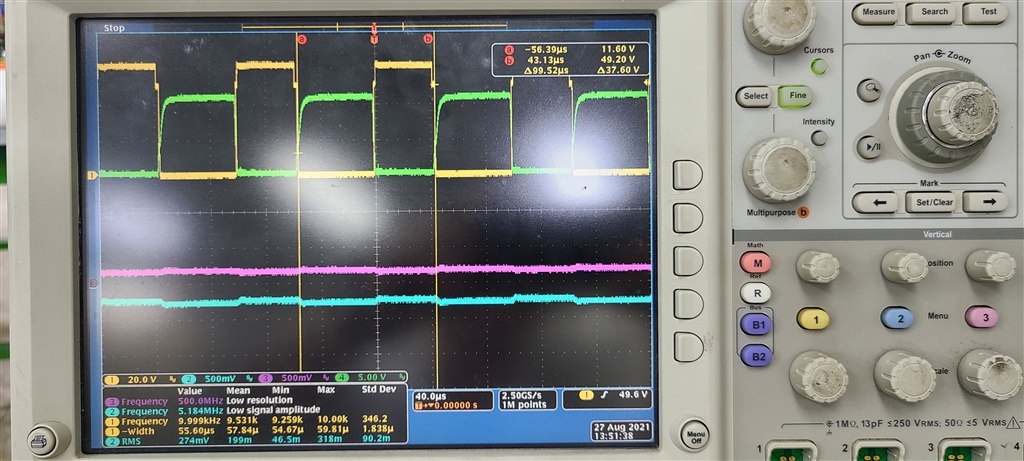
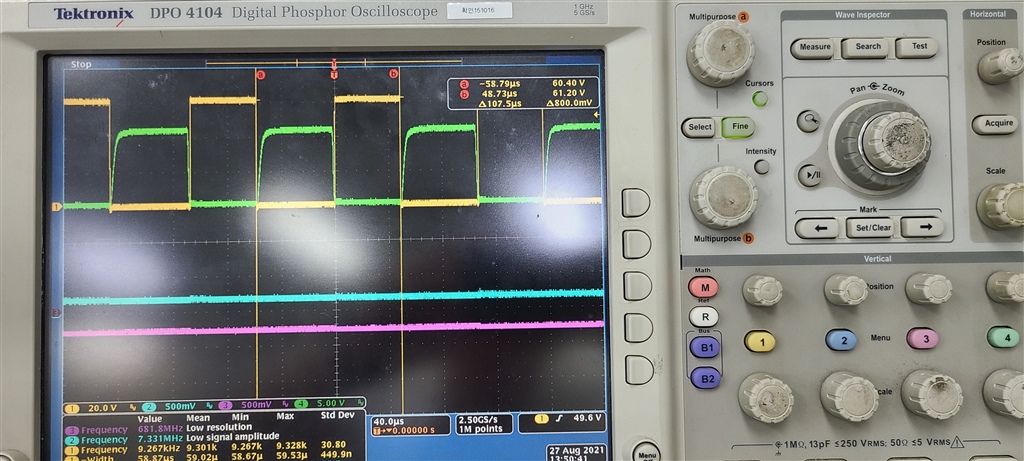
当我运行电机时、扭矩值低于1A、其运行正常、
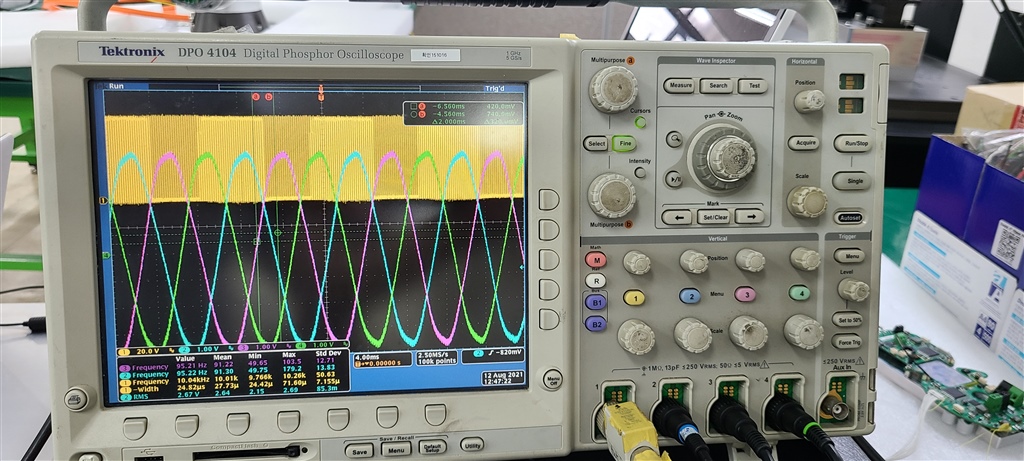
但超过1A 时、速度约为1800 rpm、电流正弦波失真(上图)
我想存在一些限制条件、但找不到。
谢谢你