

主题中讨论的其他器件:DRV8320、 INA240、 LAUNCHXL-F280049C、 BOOSTXL-DRV8320RS、 MOTORWARE、 LAUNCHXL-F28379D、 BOOSTXL-3PHGANINV
您好!
几个月以来、我一直在使用 InstaSPIN-FOC 和 FAST 观测器开发无传感器电机控制器。
我在使用非 TI MCU 之前进行了类似的设计、但我在满载启动和调优电机+观测器+ focus 参数方面遇到了很多问题、因此我决定尝试 InstaSPIN、尽管我对不同的 MCU 架构感到害怕等
我在设计过程中遇到了很多问题、其中一个是主要问题和项目多路复用问题。
定制 PCB:
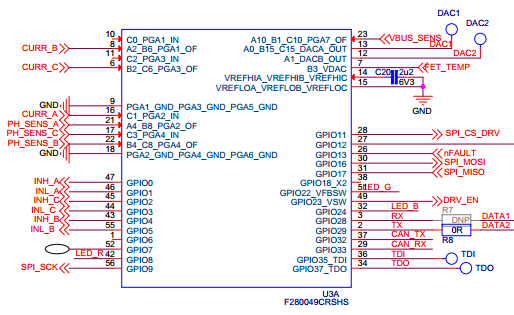
F280049C、DRV8320 + Infineon 金属 FET
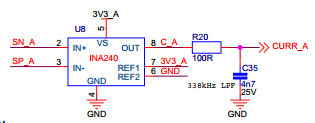
采用 INA240 CSA 的三路1MΩ Ω 直列式分流器。
电路板上有大量的大容量去耦电容器。
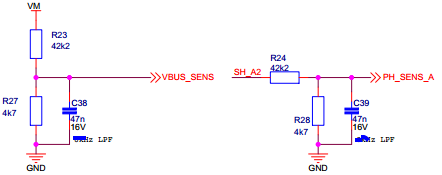
VPH +VM 感应#1:4.7K、42.2k、47nF VPH 传感器:最大33V、800.7Hz。
VPH +VM 感应#2:82nF -> 459Hz。
IPH 感应:+/-82.5A 范围。
电机参数:
800W、12n14p SM-PMSM / HOBLDC、"准"正弦 BEMF、正弦电流、
~25mΩ μ V、30µH μ A、300kV (~2.9mWb)
负载:
速度呈指数变化/空气/风扇螺旋桨
空载:0.8A 直流6000RPM (700Hz)
静态:1.4 Nm、800W、40A DC @ 4500RPM (525Hz)、
具有气流:~400-500W @5000rpm (580Hz;用于过调制/磁场减弱的空间)
动态开启步骤:1.5 Nm、1100W、60A DC。
(上述值通过6步 BLDC 控制器和5节电池测试)
电池:
5节锂电池18.5V、最大21.0V
软件:
它基于电机识别过程的 is05_MOTOR_id 实验示例和主工作代码的 is13_FW_MTPA 实验示例。
PWM/ISR 频率设置为20/20 kHz。 电流环路带宽设置为1kHz。 最大值与调制间的关系< 0.57。 FWC 关闭。
此外、我没有修改 ADC 触发来提高内联分流器利用率、它默认运行、与低侧运行相同。
我的问题:
1、从 LAUNCHXL-F280049C + BOOSTXL-DRV8320RS 开始、我无法以高于~330-350Hz 的速度运行电机、该速度接近 VPH 滤波器截止频率。 我更改了电路并将这些滤波器设置为大约~1000Hz、问题得到了解决(种类)。 利用这些知识、定制 PCB 的设计采用了 VPH 感应#1 (800Hz)。
《InstaSPIN-FOC 用户指南》建议将截止频率设置为300-400Hz 范围、即使电机旋转得快得多、并且有一些参考指南采用了与以1600Hz 频率运行无人机电机类似的方法。 还有许多重复的论坛主题帖(尤其是28004x 芯片)、它们的问题与我遇到的问题相同。
由于纸张非常过时且具有误导性、"有访问权限"的人能否解释其背后隐藏的内容以及此滤波器如何影响估算器?
2、即使滤波器设置为800Hz、控制器在约480-500Hz 的负载下仍会失去稳定性、导致电流尖峰过大。 在没有负载的情况下、我能够根据过调制和磁场减弱设置将电机旋转高达600-700Hz。 我已经完成了多项测试、尝试找到问题并消除了:
- PID 回路:同样的问题发生在闭合速度回路、闭合扭矩回路、开环控制 VQ 和闭合 ID=0、双开环控制 VQ 和 Vd=0。
- 直流总线利用率:在不同电流电平下以5或6芯电池测试时、在相同速度下出现问题。
- 过调制设置为关闭
- 磁场减弱关闭
- 在多个 PWM 开关频率下进行了测试
- 对 LAUNCHXL-F280049C + BOOSTXL-DRV8320RS 应用了相同的限制、但我认为它与直流总线利用率限制有关、希望直列式解决方案能够解决问题。
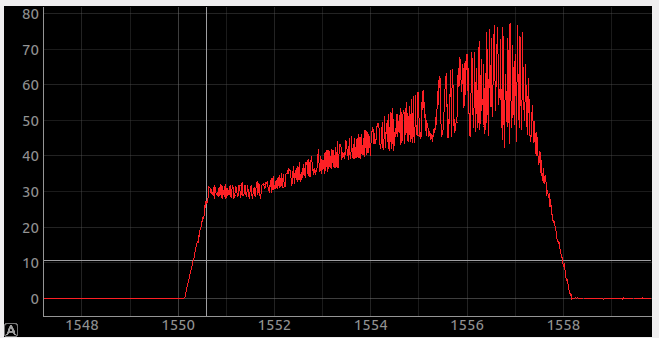
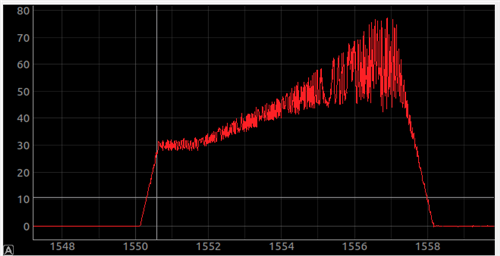
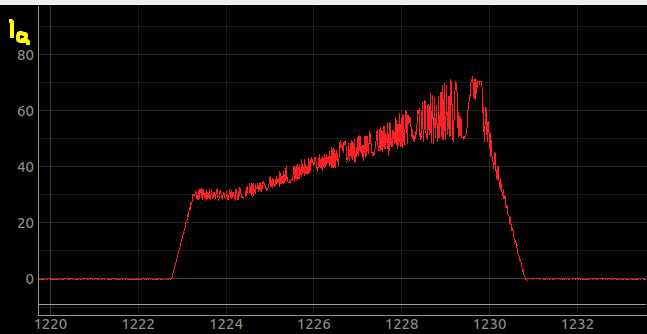
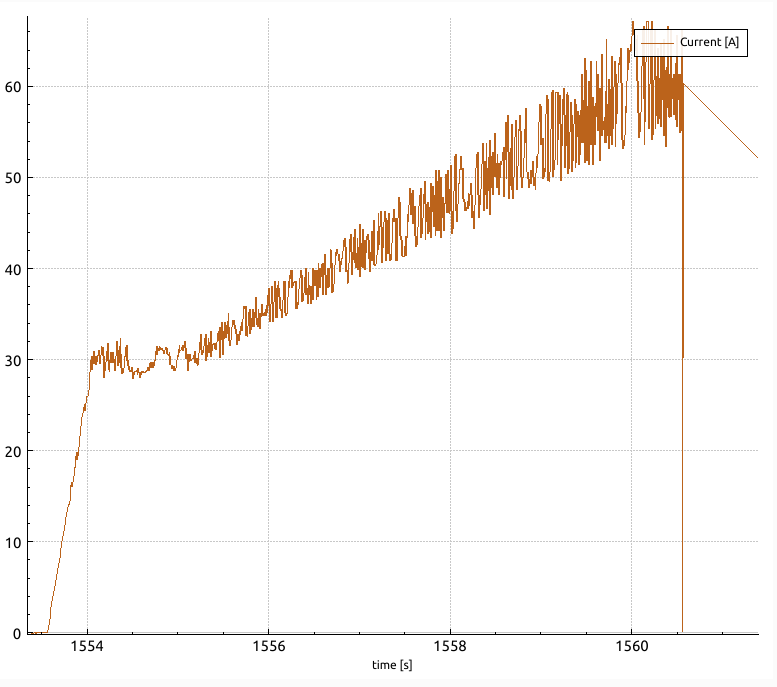
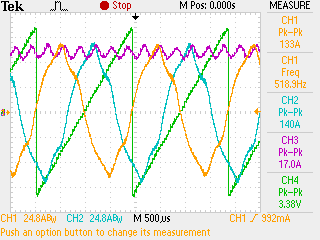
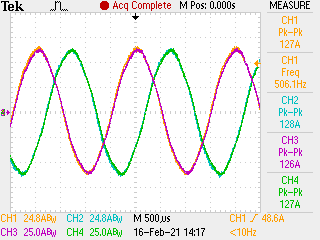
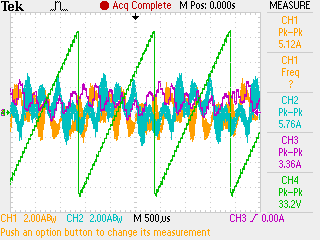
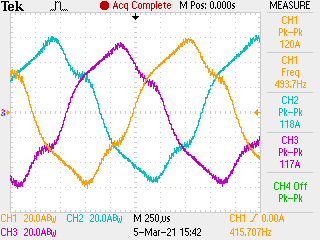
这是来自具有大电流尖峰的评估板的60A IQ 数据记录图: 
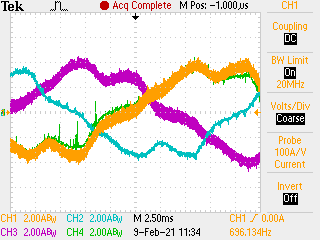
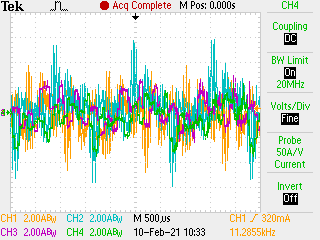
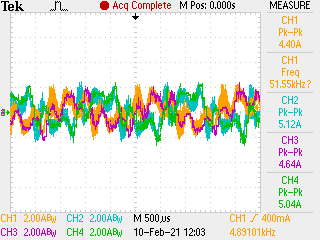
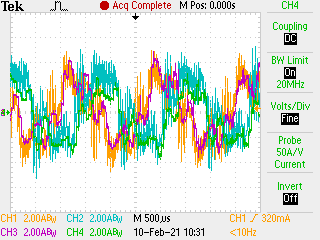
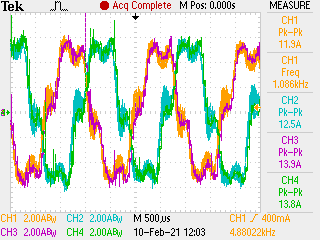
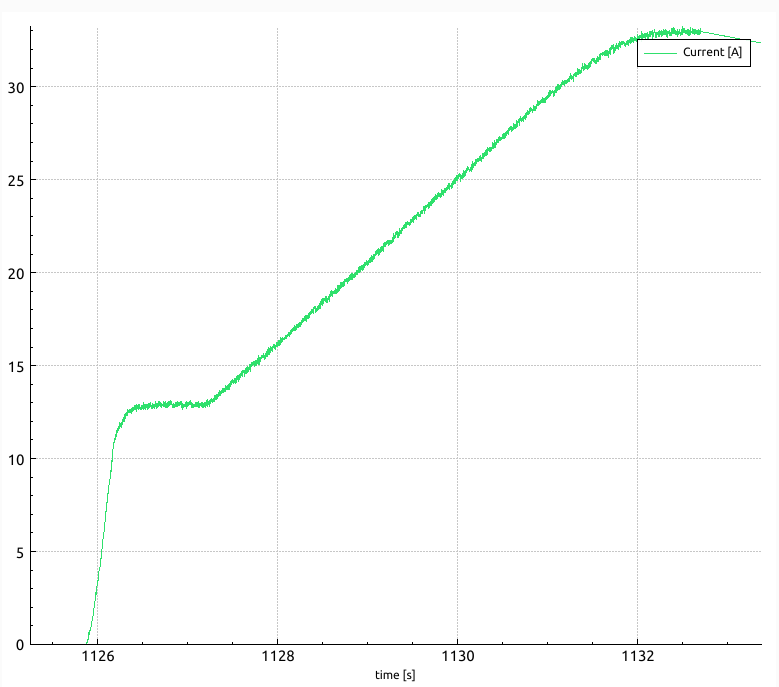
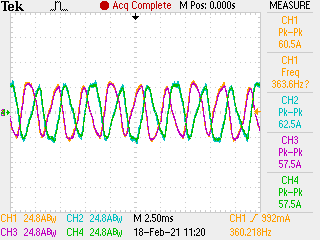
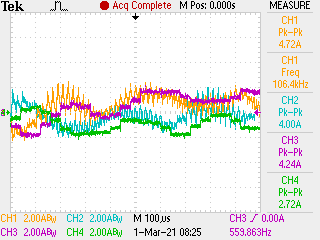
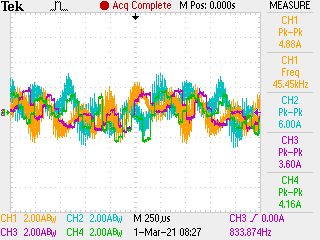
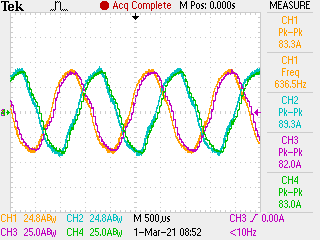
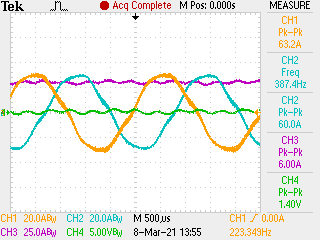
这些是使用定制 PCB 的从 dyno 获取的图形。 我的调试选项有限、因此在接收电流探头并安全设置设备以进行负载下的测试之前、我无法提供更详细的信号。
电流是在电池引线上测量的。
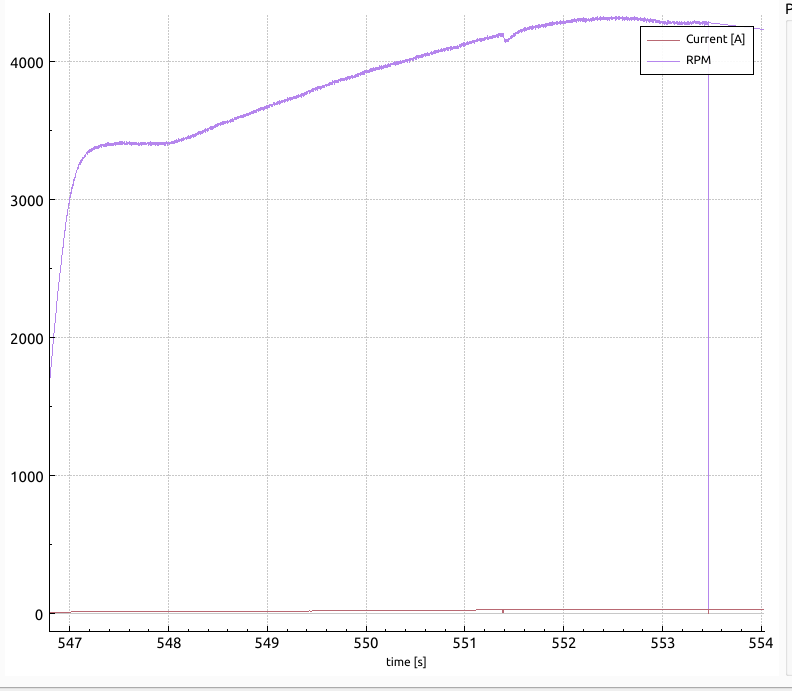
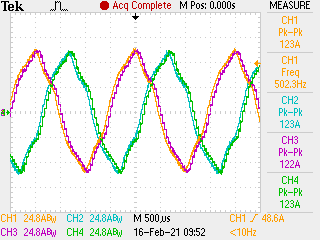
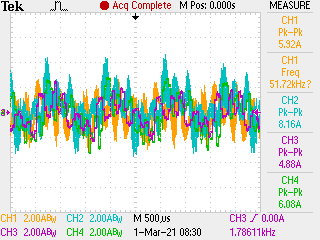
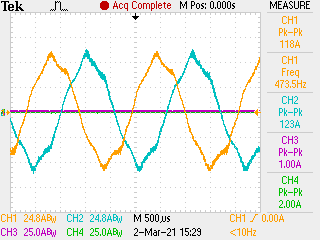
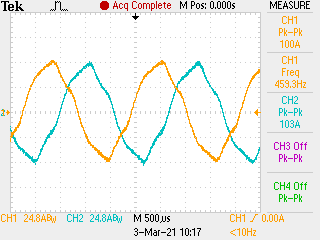
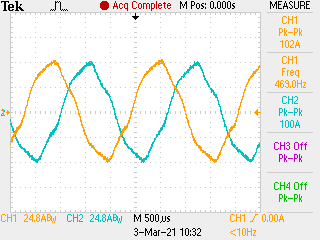
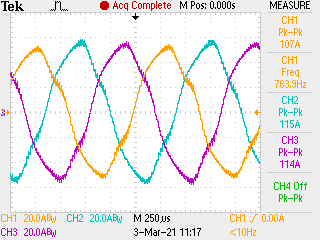
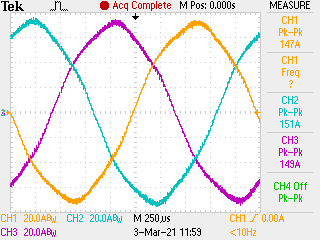
5S 下的满载启动: 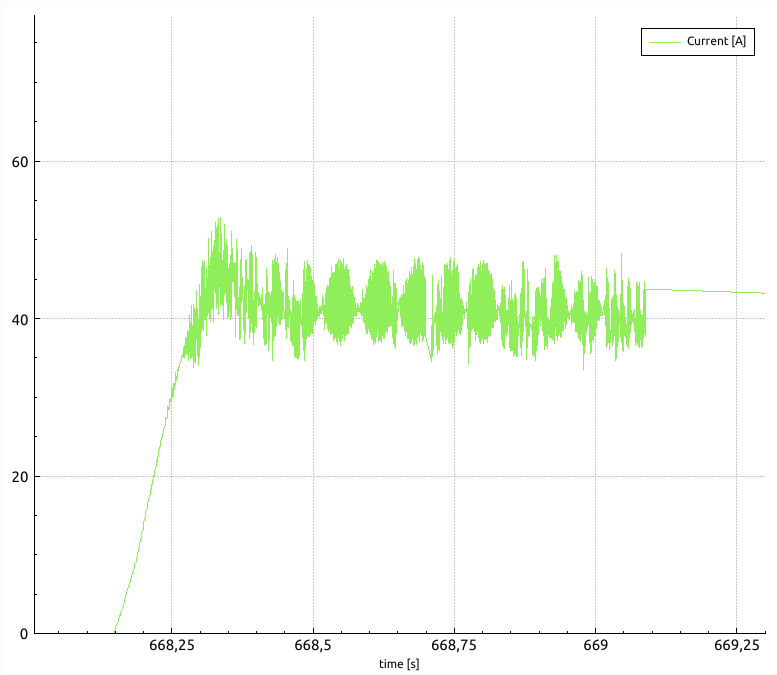
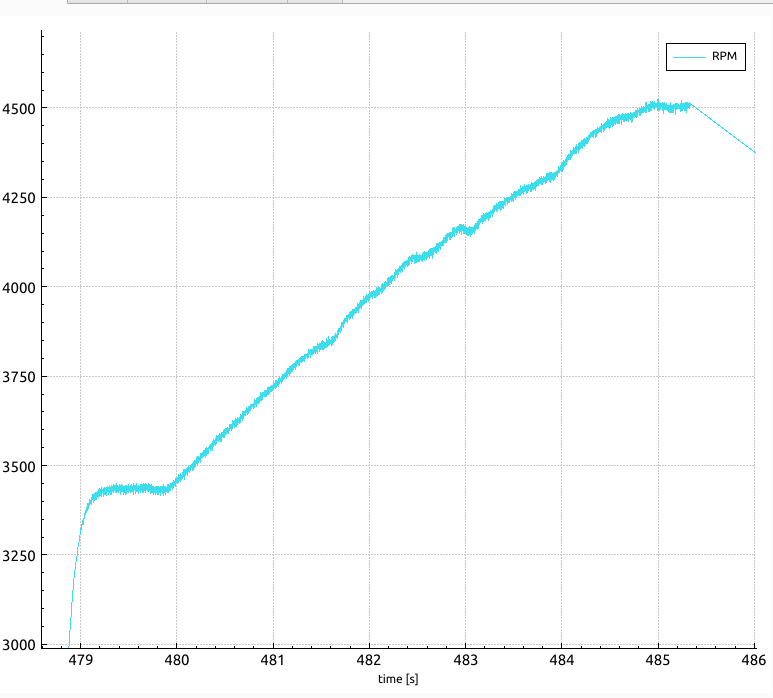
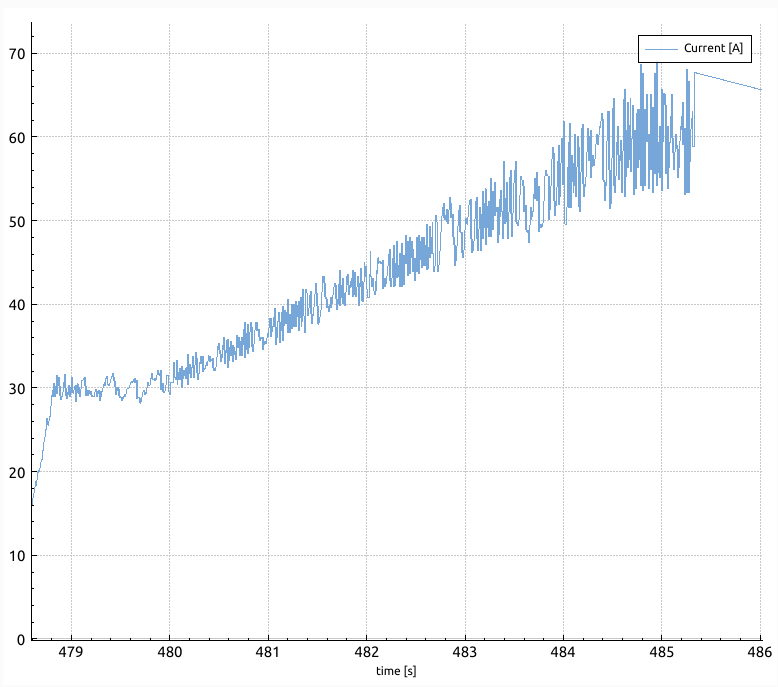
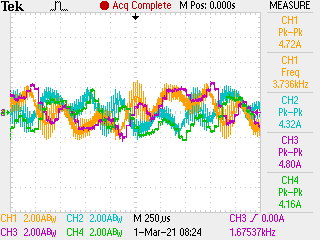
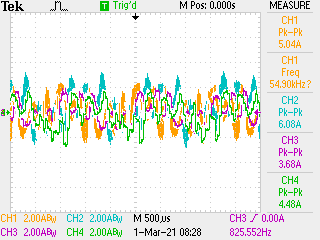
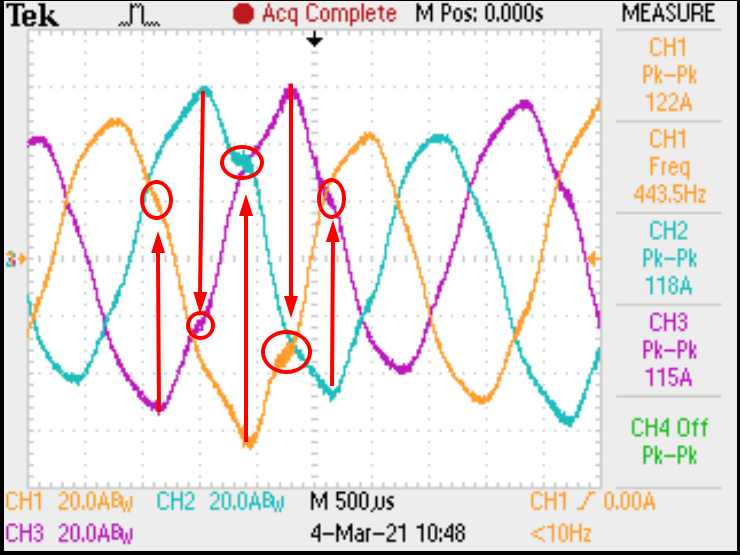
5S 下扫描+ 当前图表: 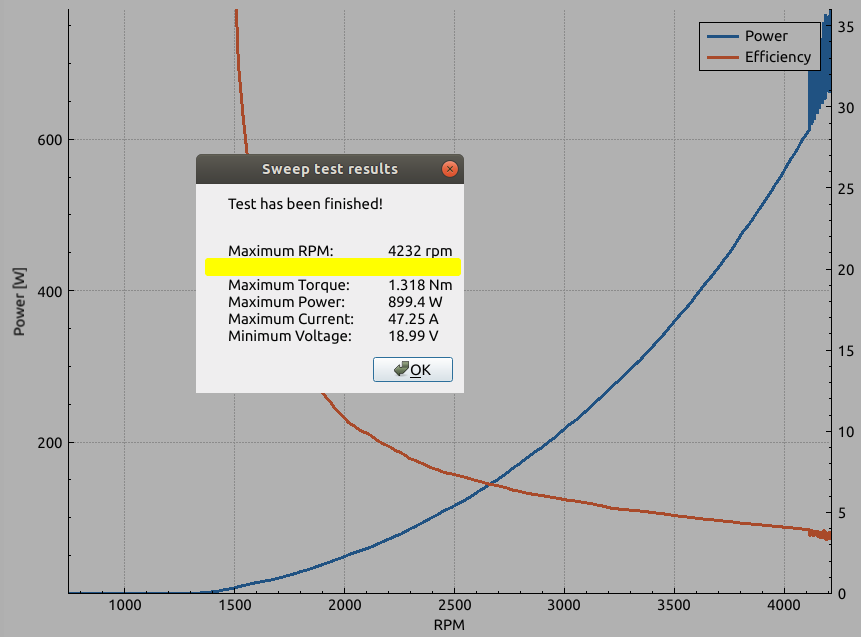

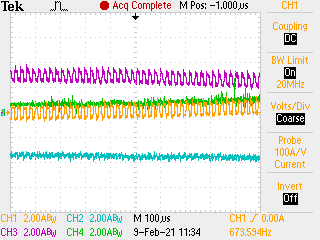
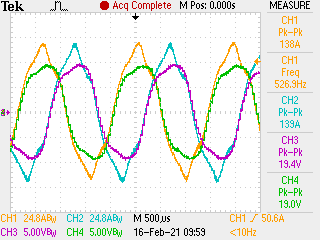
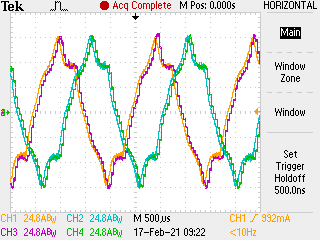
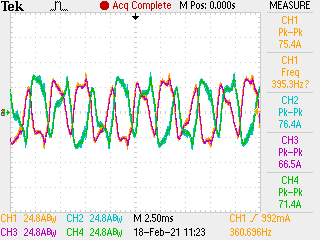
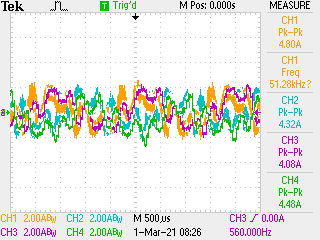
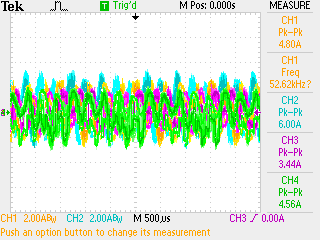
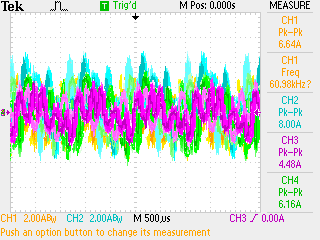
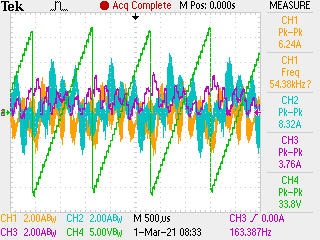
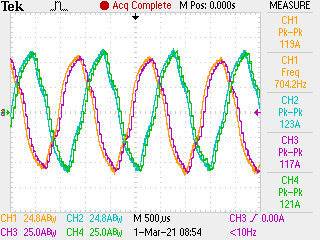
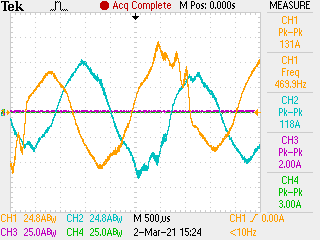
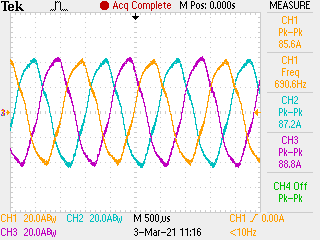
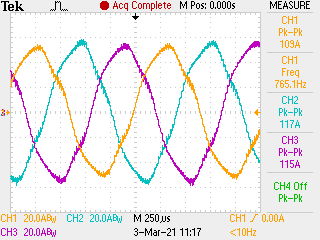
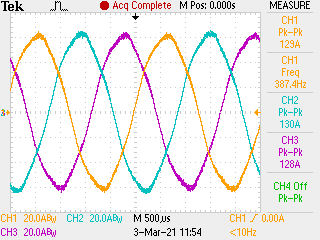
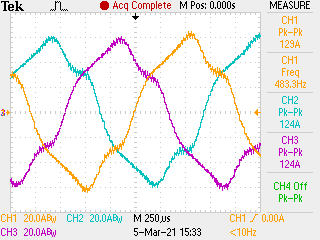
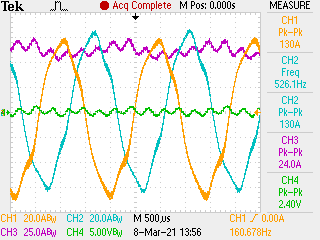
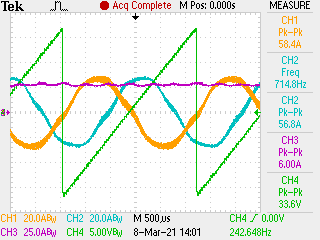
6S 时的满载启动: 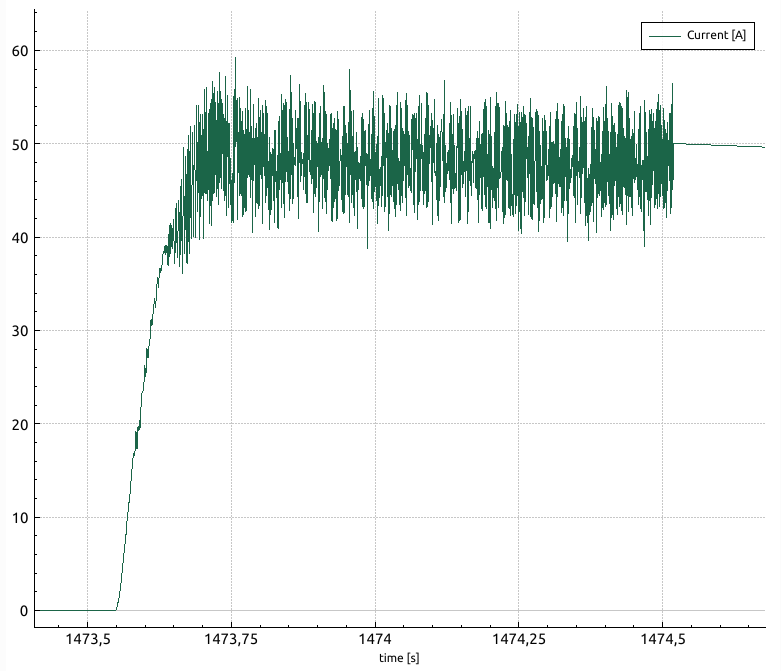
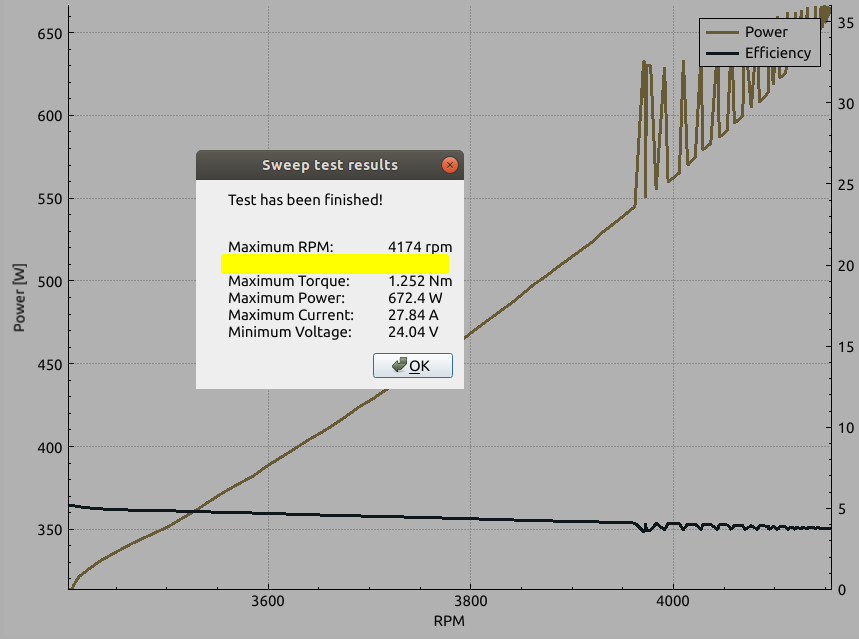
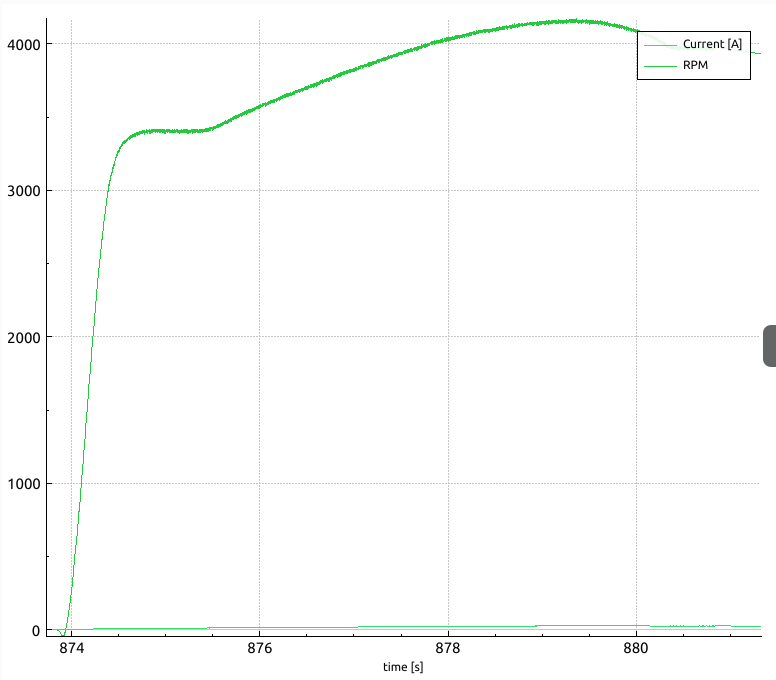
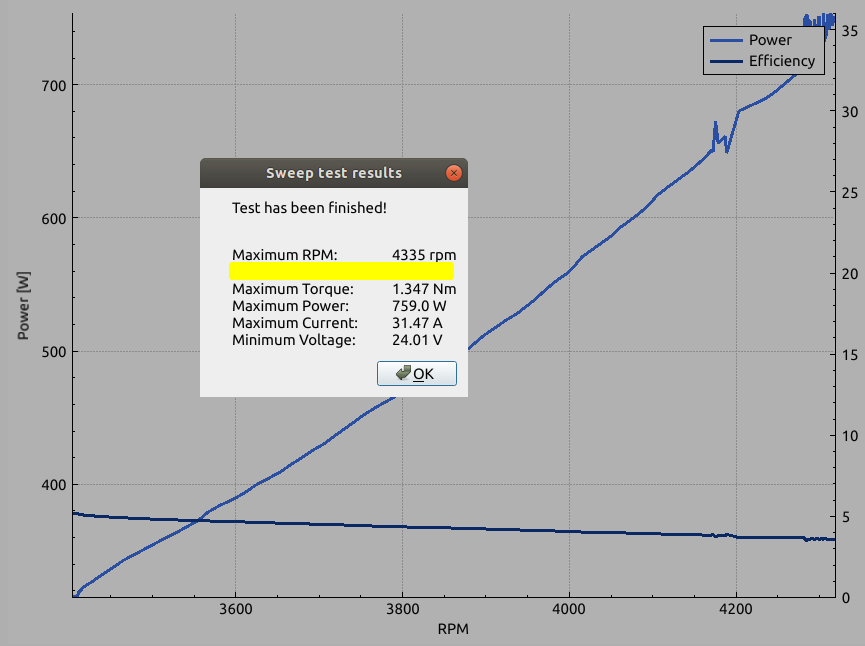
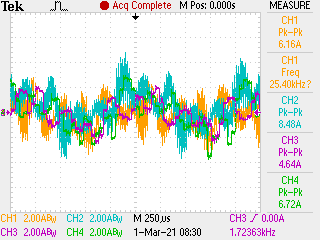
6S 扫描+ 当前图表: 

SDK 3.01.00.00更新通过 fluxHF.lib 函数提供了对隐藏估算器参数的额外访问:EST_setOneOverFluxGain_SF ()、EST_setFreqLFP_SF ()、EST_setBemf_SF ()。
没有有关这些参数的文档、这些参数的确切变化以及如何对它们进行调优或测试的信息。 我在这个论坛上找到了一些主题、帮助我对其进行了一些调整、他们似乎部分解决了问题 nr。 因此、我能够使用 VPH 感应#2 (459Hz)电路、并部分修复了问题 nr。 2.
即使在 fluxHF 固定之后、控制器仍能在远离最佳点的位置工作。
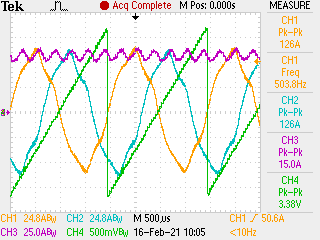
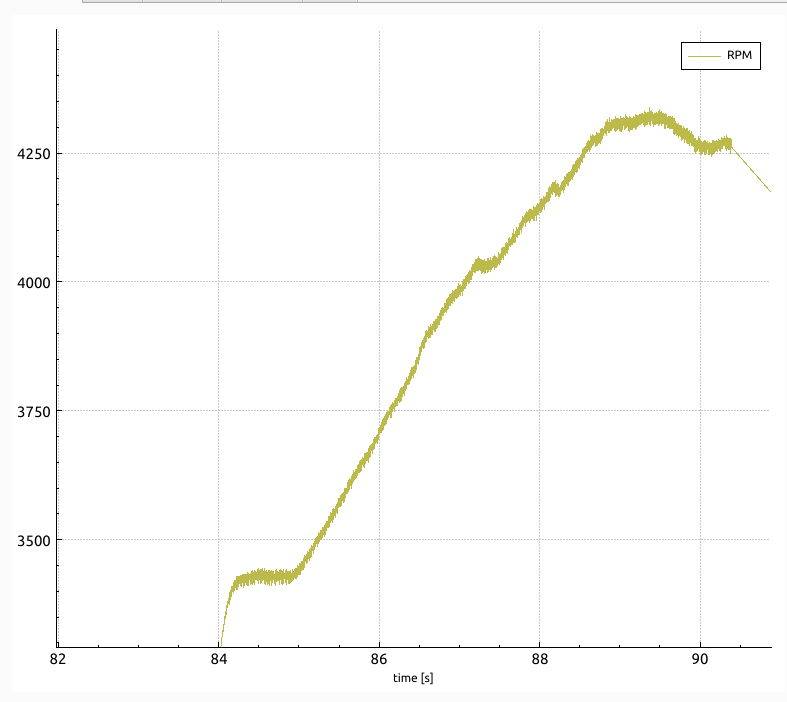
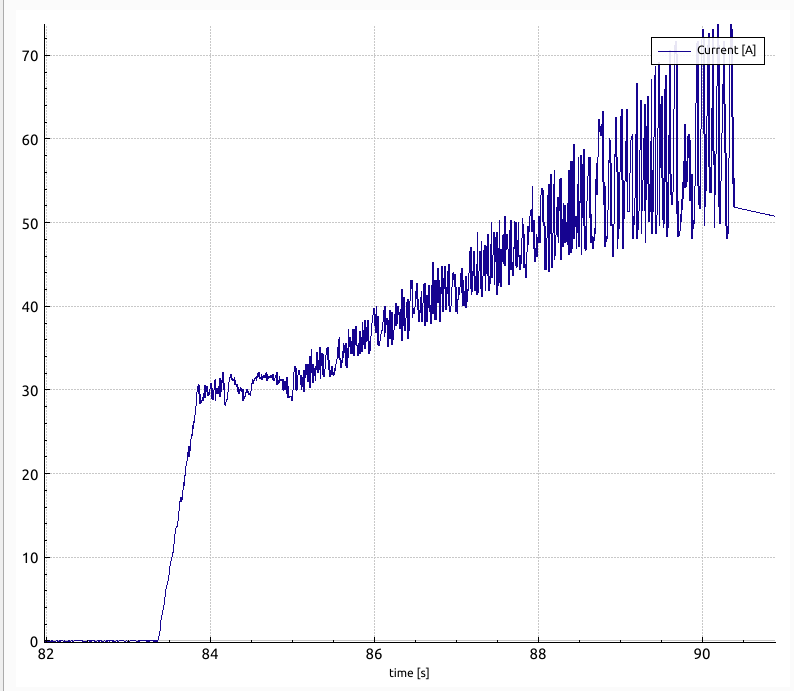
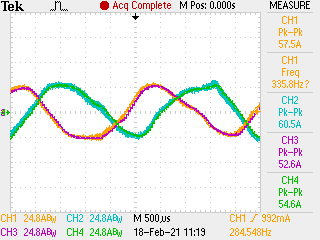
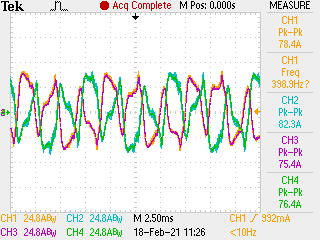
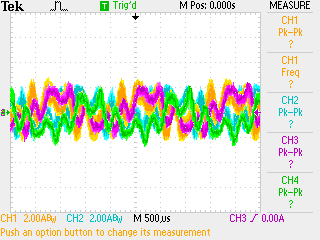
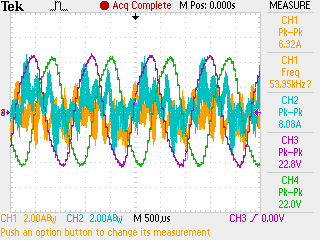
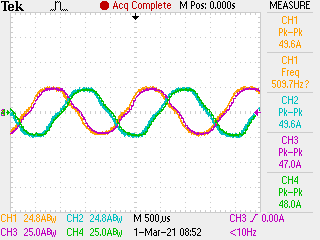
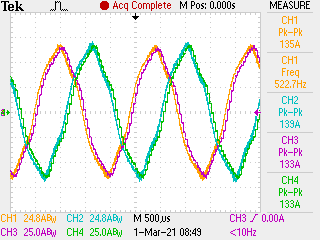
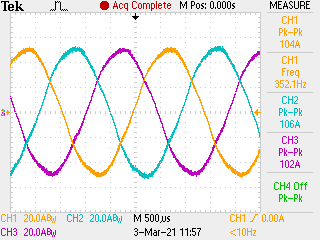
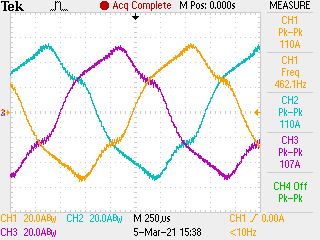
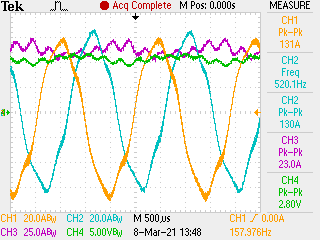
5S 下的满载启动: 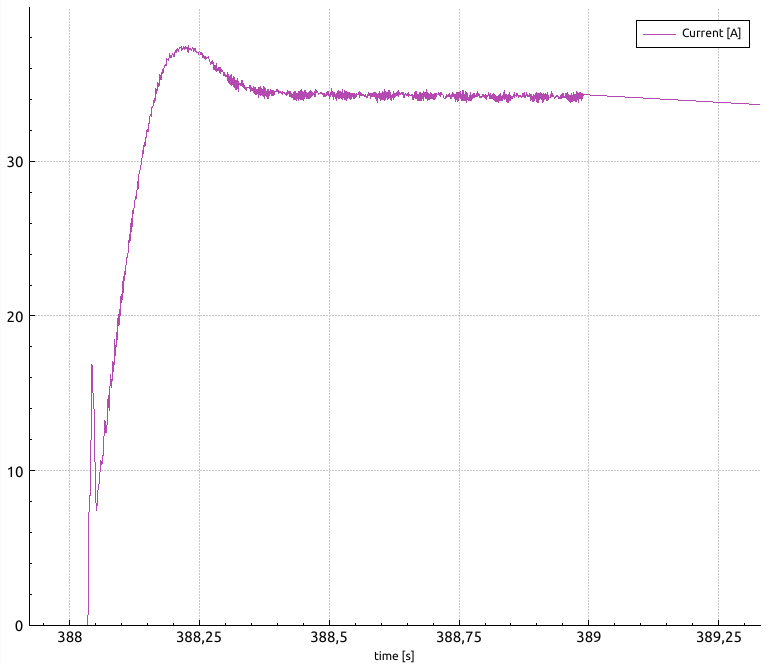
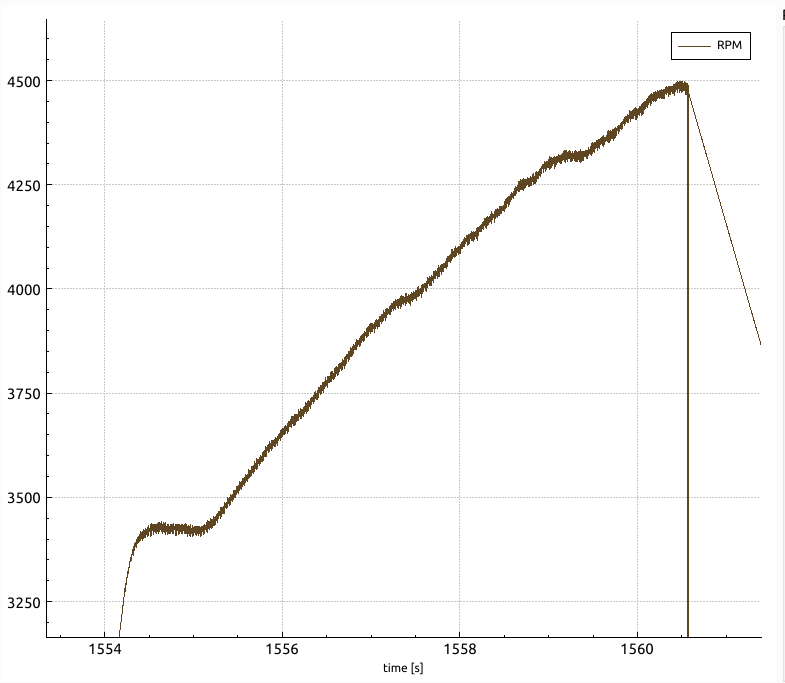
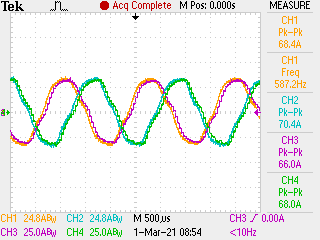
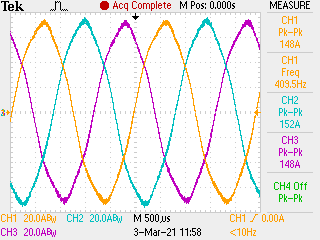
6S 时的扫描仍然显示出大约~4000RPM 的一些静音、之后性能/效率下降: 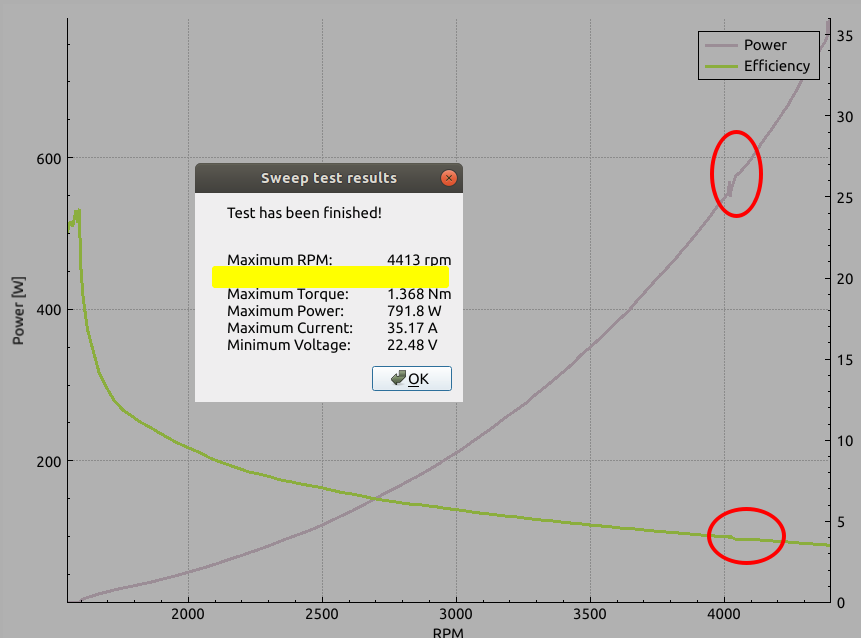
此外、在我调整了这3个参数后、我尝试了不同的电机、执行了电机识别过程、并且无法实现与之前电机相同的性能、除非我再次调整了3个参数! 第二个电机的转速高达3700rpm。 我不能单独调整每个电机的这些参数。
a.这些参数如何连接到 nr。 1个问题? 保持在#1 VPH 感应更理想、这种感应的工作方式不需要 fluxHF 参数或#2、更接近用户指南建议的值。
b.如何对这些参数进行完美调试和调优、以避免性能下降?
c.估算器内部是否仍有一些可解决这些问题的参数?
在 SDK 3.01.00.00版本之前、我认为问题与我的硬件和软件修改有关、但这清楚地表明稳定性问题主要与内置 FAST 估算器有关、我已经不希望能够自行解决。
4.在 TI MCU 之间对 InstaSPIN ROM 估算器的调整是否不同? 如果切换到不同的 MCU、可能使用"-MOTION"、估算器能否更好地与我的电机配合工作? 如果是、有哪些选项?
5.如何优化直列式电流感应的代码? 与低侧相比、它是否能提供任何优势? INA240放大器似乎比低侧分流器和内置 PGA 慢得多。 我想尽可能多地使用电池、因为我要从6步驱动切换到 FOC、而不能更改电池、并且必须保持性能水平。 这就是我选择输入线路的原因、但我认为我需要修改 ADC 触发以真正使用它们。
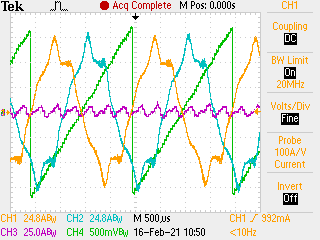
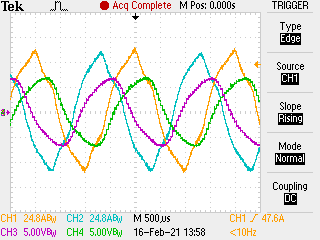
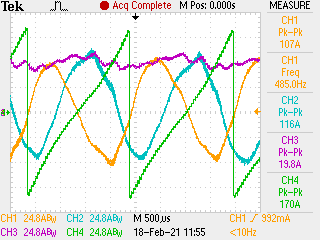
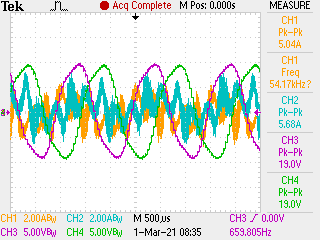
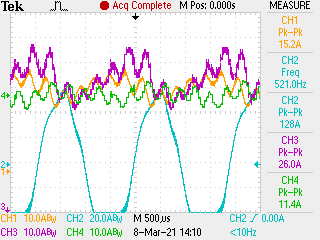
6.如何调整 IDRIVE 设置? 我在未连接电机的情况下进行了一些测试、然后
默认设置为 Isource=1A、ISINK = 2A 时观察到的失真图:
CH1:VGL、CH2:VDSL、CH3:VGH、CH4:VDSH
高侧上升: 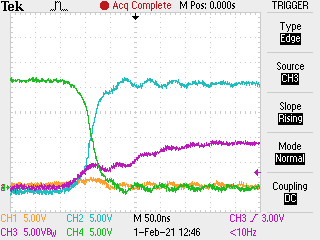
低侧上升: 
因此、我已经将其下调至 Isource=0.44A (HS 上 TR=100ns)、Isource=0.33A (LS 上 TR=133ns)和 Left ISINK = 2A (两者均为 Tf=22ns)、从而消除了不使用电机时的失真。
这是正确的方式吗? 对于电机、即使在默认设置下、这些图形也看起来很平滑。
此外、如何正确设置开关死区时间? 为了安全起见、我将其设置为200ns、但对于智能栅极驱动器"握手"、我是否可以将其设置为50ns 或100ns、并在保持最高性能的同时仍保持安全?
6.+/- 82.5A 电流感应范围是否足以用于此电机? 我几乎想用0.5mΩ=~60A 的电流实现最大效率、但当我尝试用 Ω 分流器将其加倍以避免饱和时、控制器将由于额外的噪声和精度的不足而无法运行。
7.是否有人观察到 B 相电流比其他两个相电流噪声更小? 我已经在定制硬件和评估板上对其进行了测试、还更改了探头、电机线... 相同的观察结果。 是否存在导致这种情况的电流注入?
8. 20kHz 是电机的最佳选择吗? 我希望以更高的频率运行它、但逆变器需要更多的开关电流、并且电流测量的采样时间更短。 此外、在更高的 PWM 频率下、电机会发出声音更大(不应该相反?)、尤其是在电流偏移校准(50%调制)方面、并且电机静止时、Iq 电流上会产生更多干扰。 可能是什么原因导致了这种情况? 测试时保持 ISR 频率:PWM20/ISR20、40/20和60/20kHz。
总结:
这是相当多的复杂问题、但我希望能收到尽可能多的答案、并让这个项目继续进行。 我计划在接收电流探头时、通过适当的信号图提供更多测试。 这些还有助于识别潜在的硬件感应问题等
我非常喜欢 TI 的内置电机识别、轻松调优(尽管有 FluxHF)、并且对速度/低速性能印象非常深刻。 但是、如果我无法实现所需的全功率性能、这一切都是毫无结果的。 直到 SDK 更新、我几乎放弃了。 之后、我认为利用 OVM 和 FW 算法解决该问题并进一步提高性能是非常接近的。
此致、
Mateusz







{kind=link}