请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069 主题中讨论的其他器件:TIDA-00176、 controlSUITE、 C2000WARE
您好!
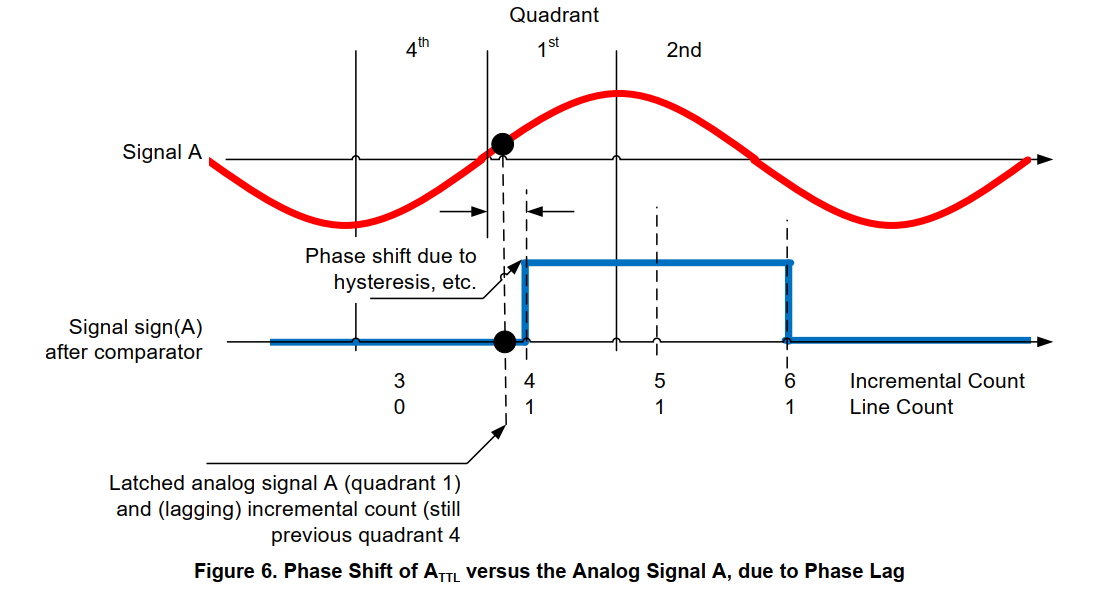
我无法理解 TIDUA05A 中的正弦/余弦编码器相移校正方法。 当我用这种方法在 DSP 中进行编程时、当正弦信号 A 跨过零时、位置将下降、当 QEP (比较器后的信号 A)步进/改变时、位置将升高、如图3所示。 随着速度/频率的上升、相移将增加/改变、我们如何纠正它? 谢谢。