请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377D Thread 中讨论的其他器件:C2000WARE、 controlSUITE
您好!
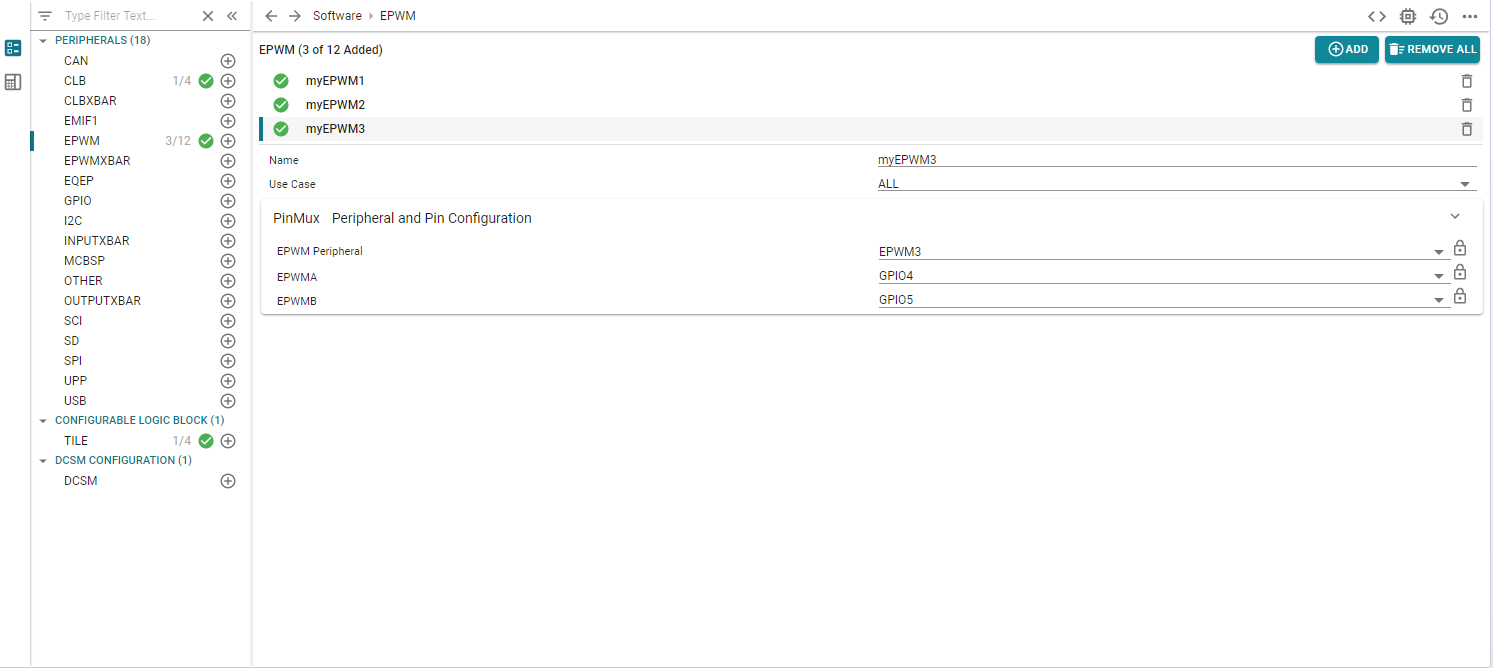
我是第一次尝试使用 CLB 工具来生成自定义的 ePWM 信号、它使用已经产生的另外两个 ePWM 信号:PWM1和 PWM2。
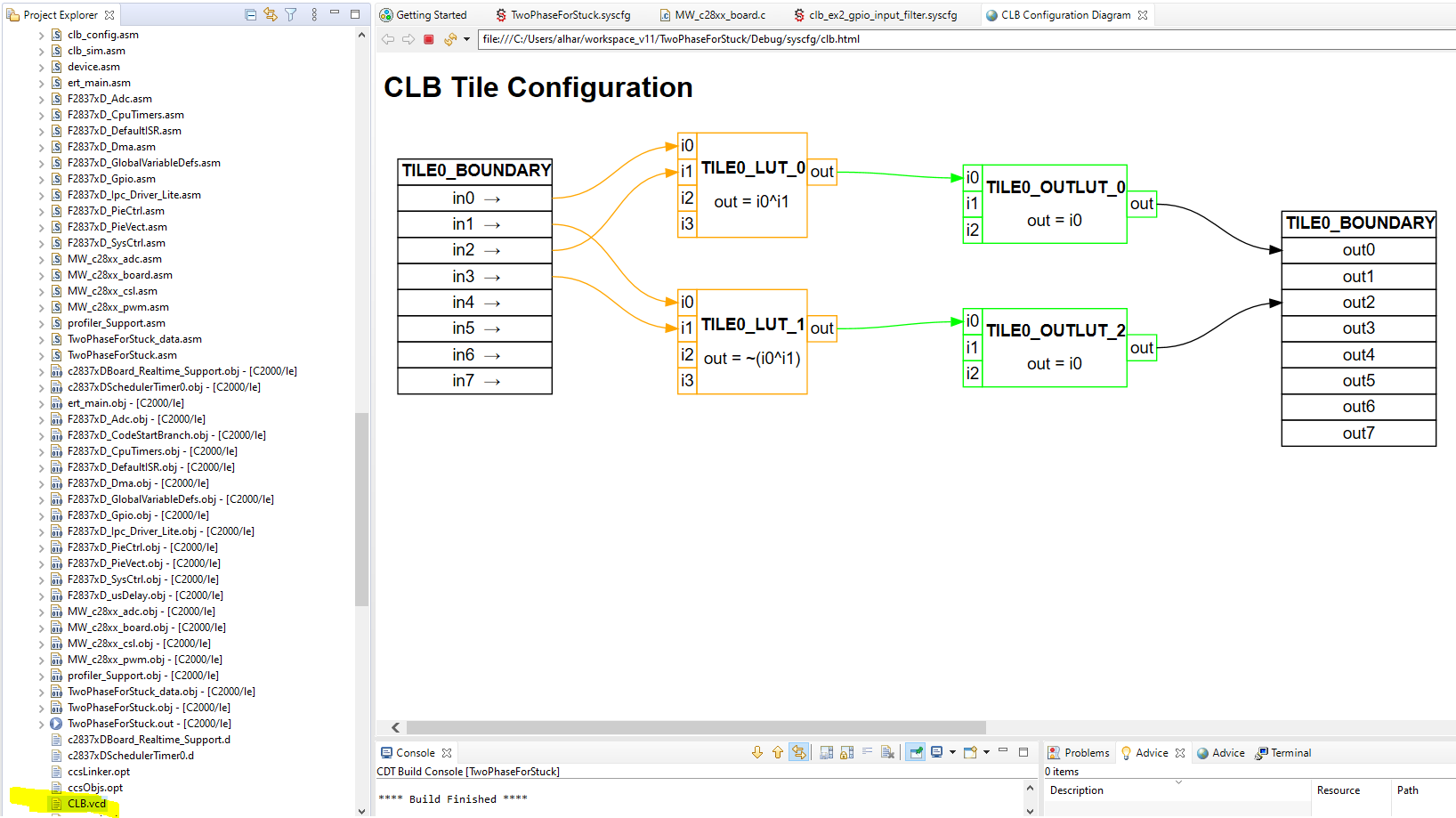
我要生成的第三个信号(PWM3)应基于以下逻辑:
(PWM3A= PWM1A XOR PWM2A)和(PWM3B =PWM1A NXOR PWM2A)
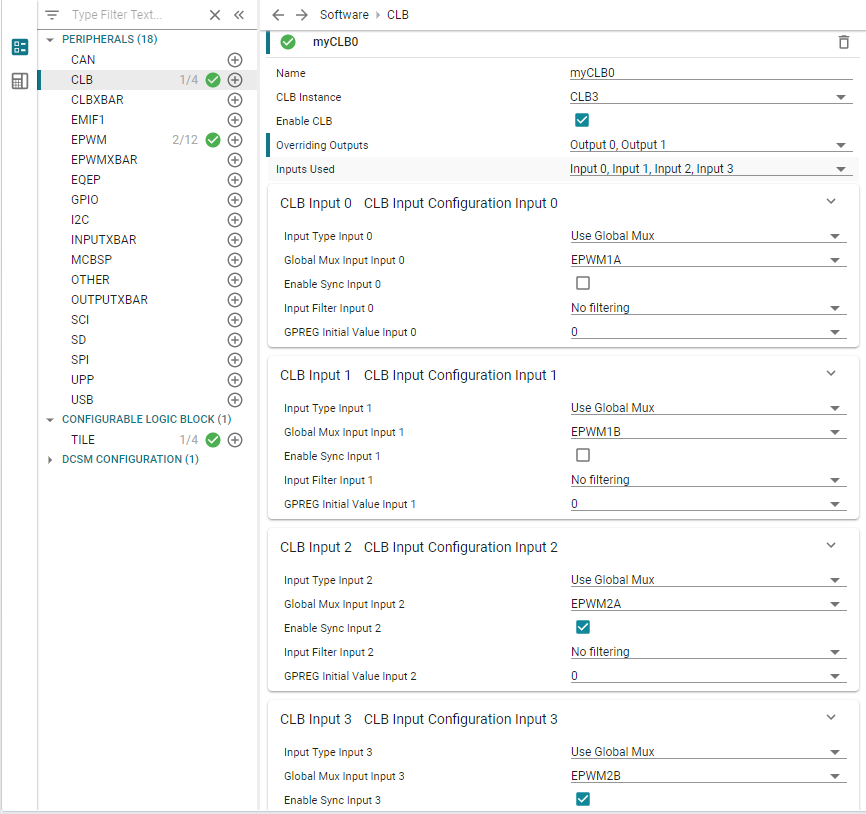
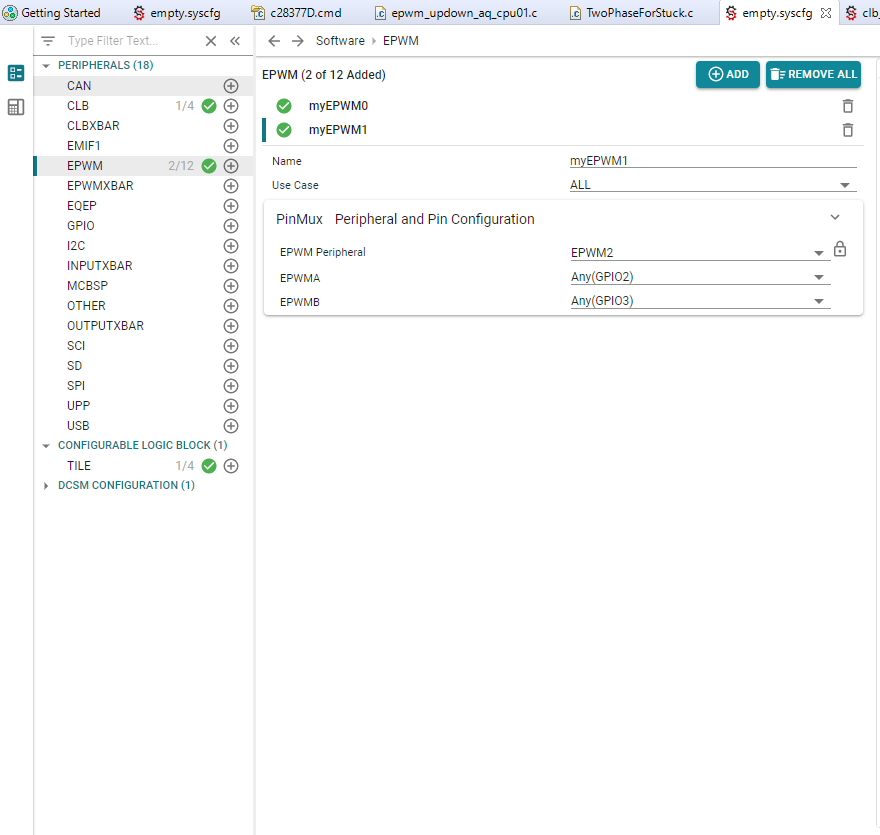
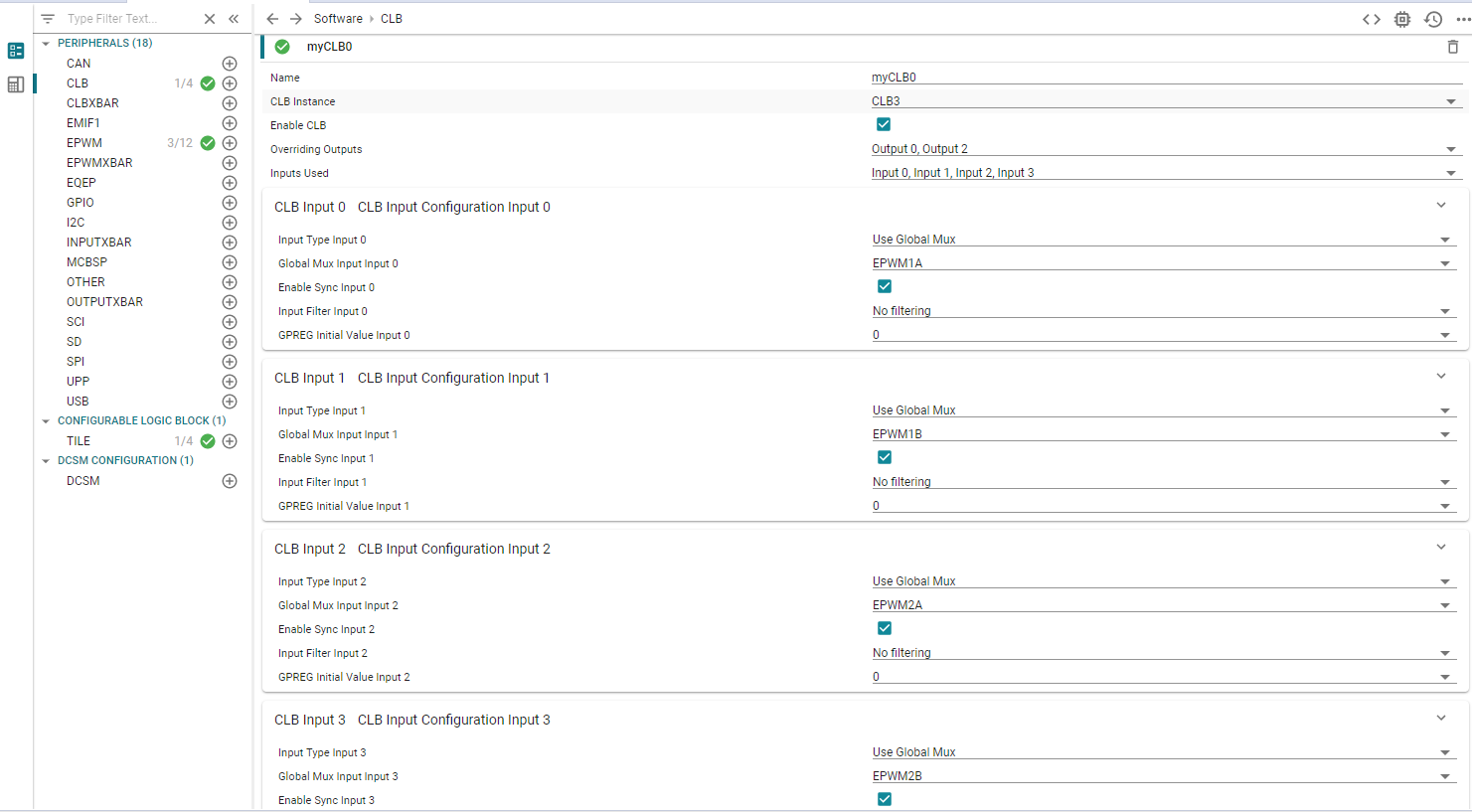
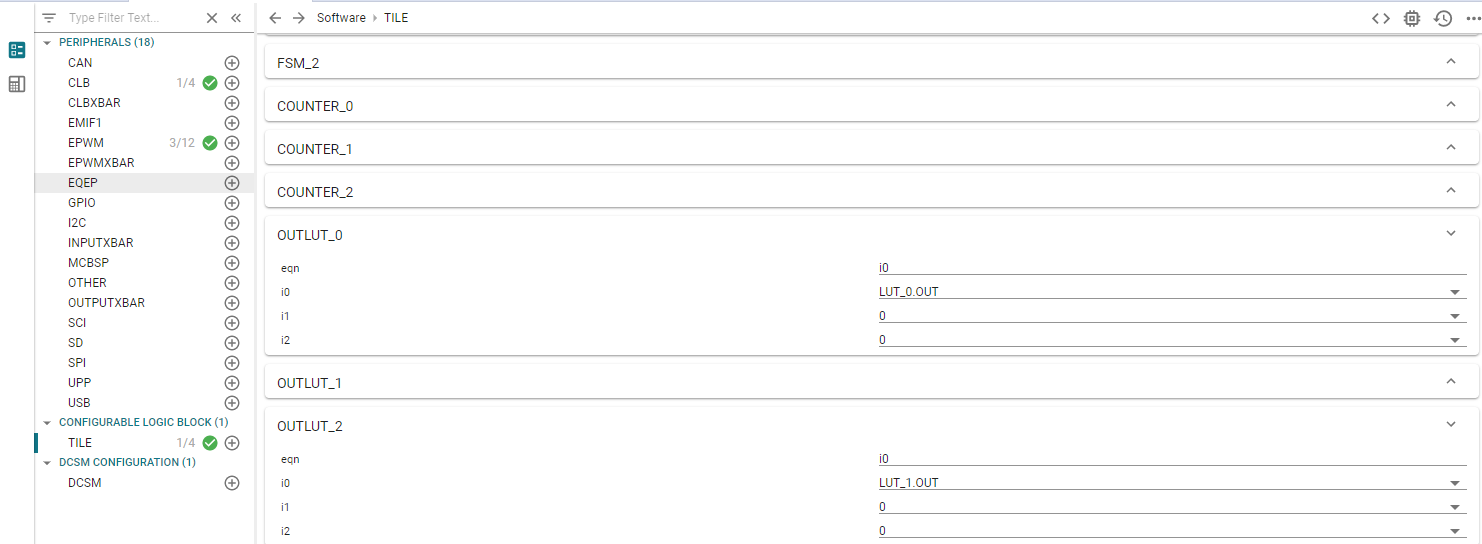
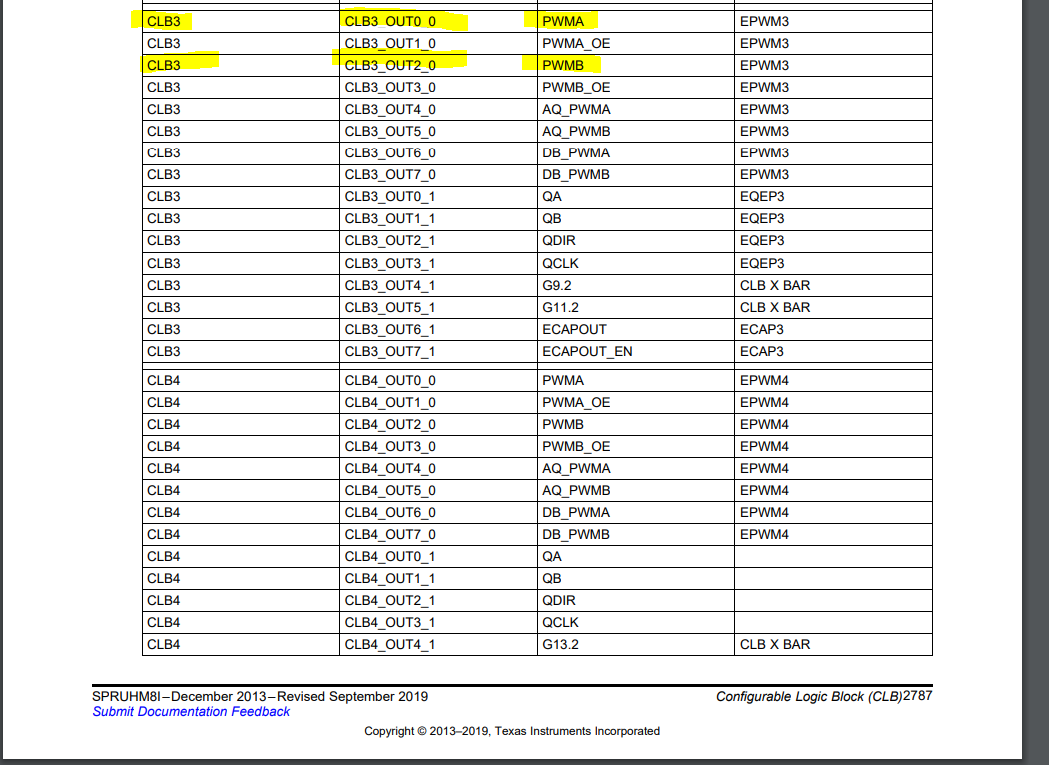
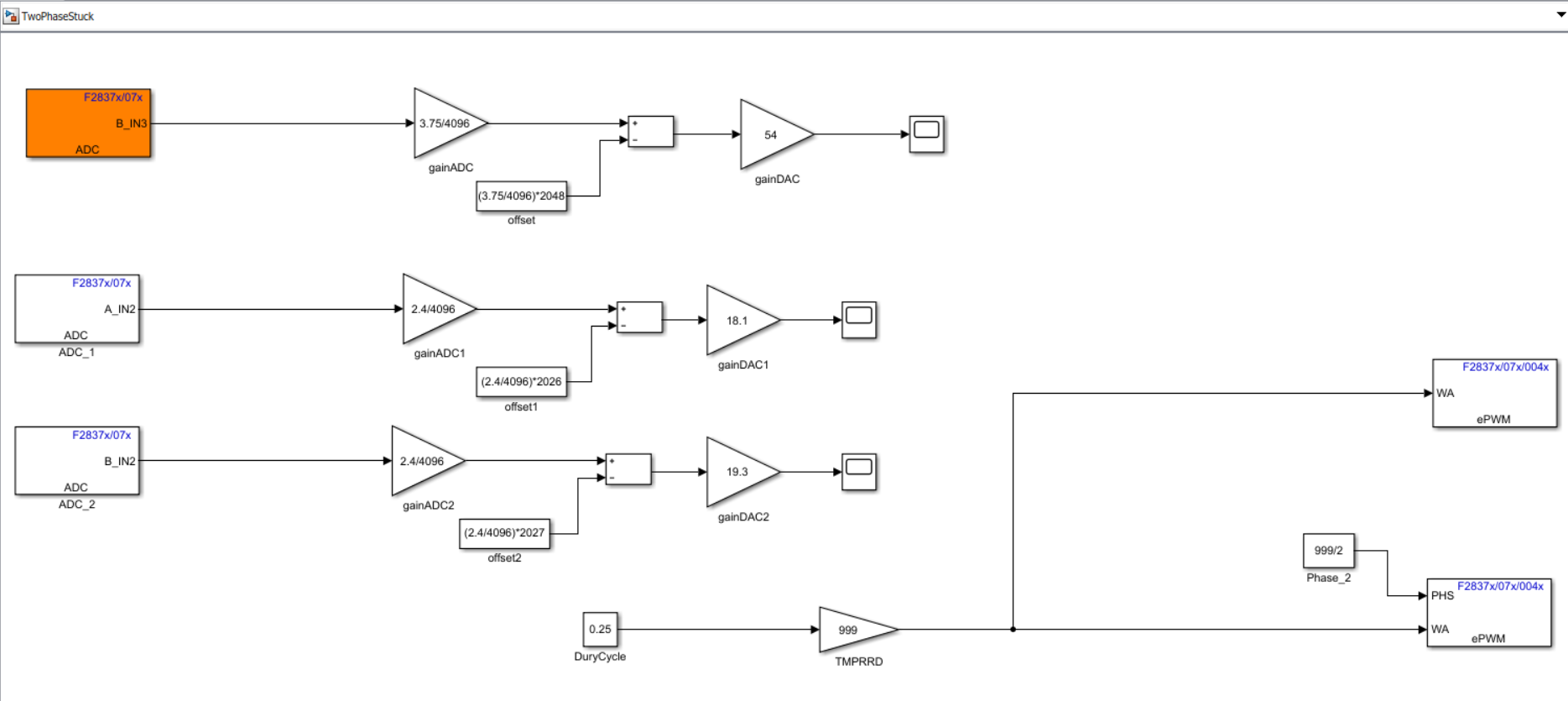
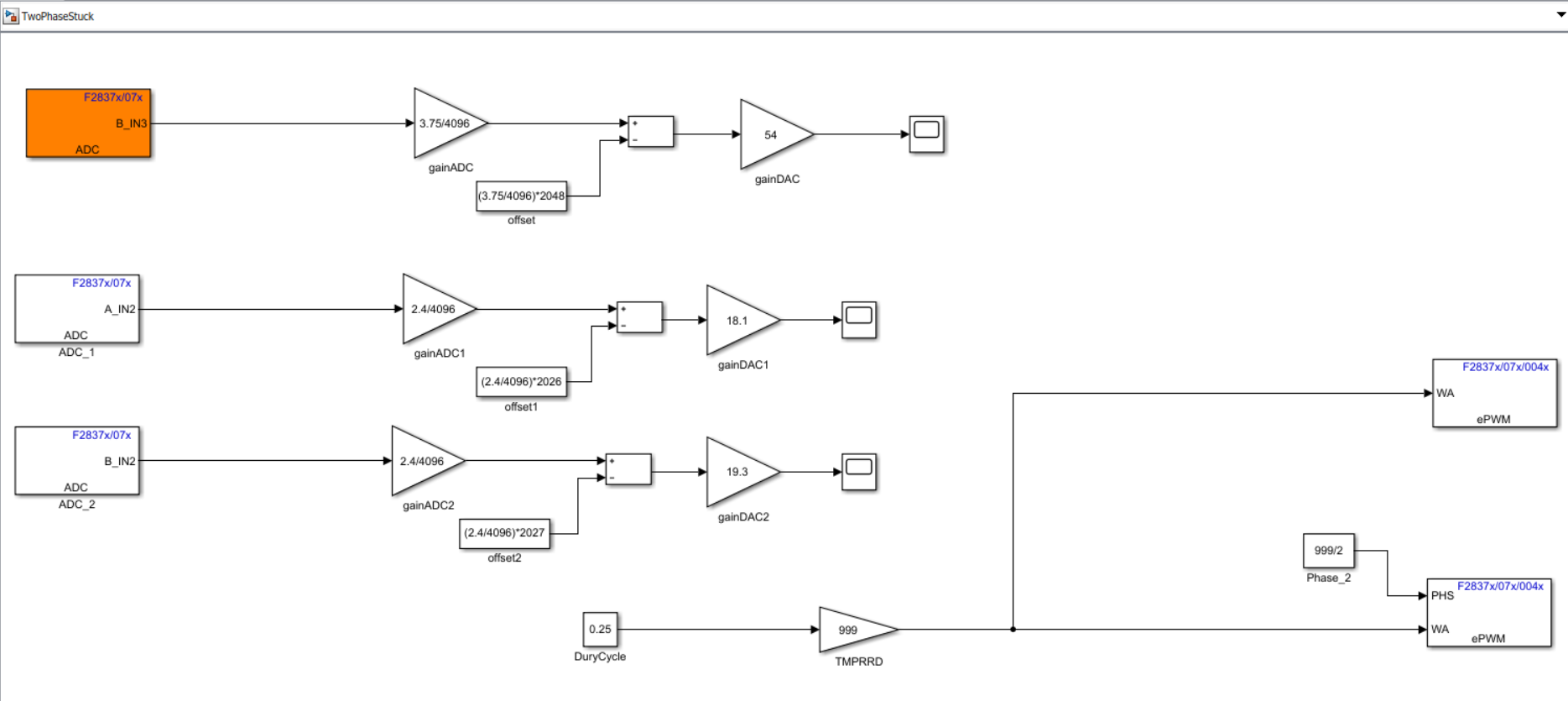
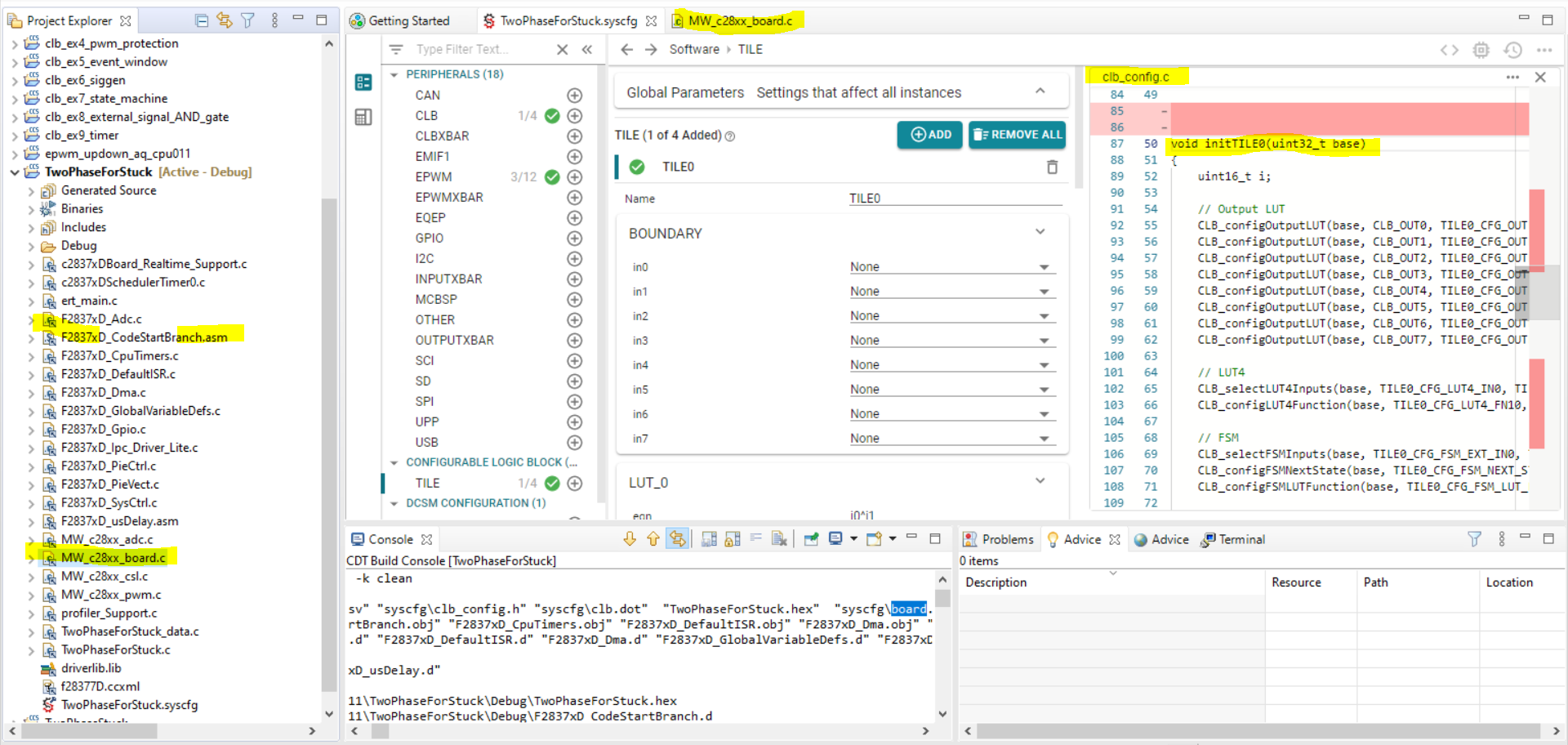
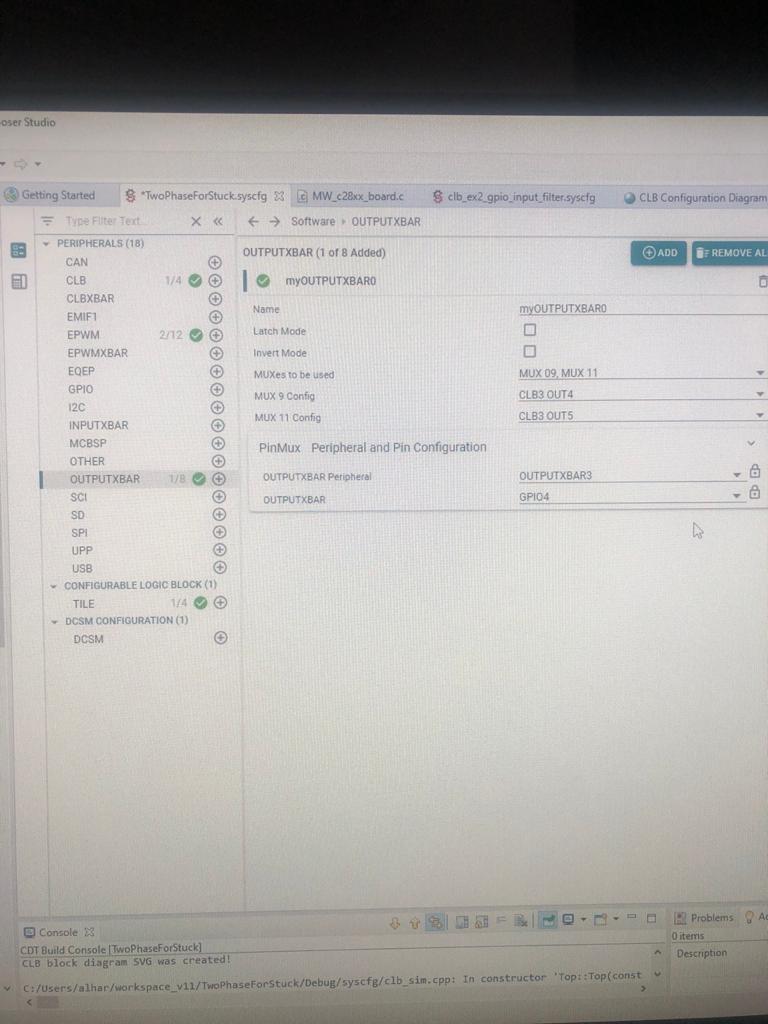
我尝试通过 CLB 访问 EPWM1、2、3、并且使用(EPWM1A、EPWM2A、EPWM1B、EPWM2B) 作为 CLB 逻辑块的输入(使用 CLB3)、然后我在 CLB 模块的 LUT 中实现了逻辑、 然后 、通过 CLB 输出相交(覆盖)将信号输出到 EPWM3A 和 EPWM3B。
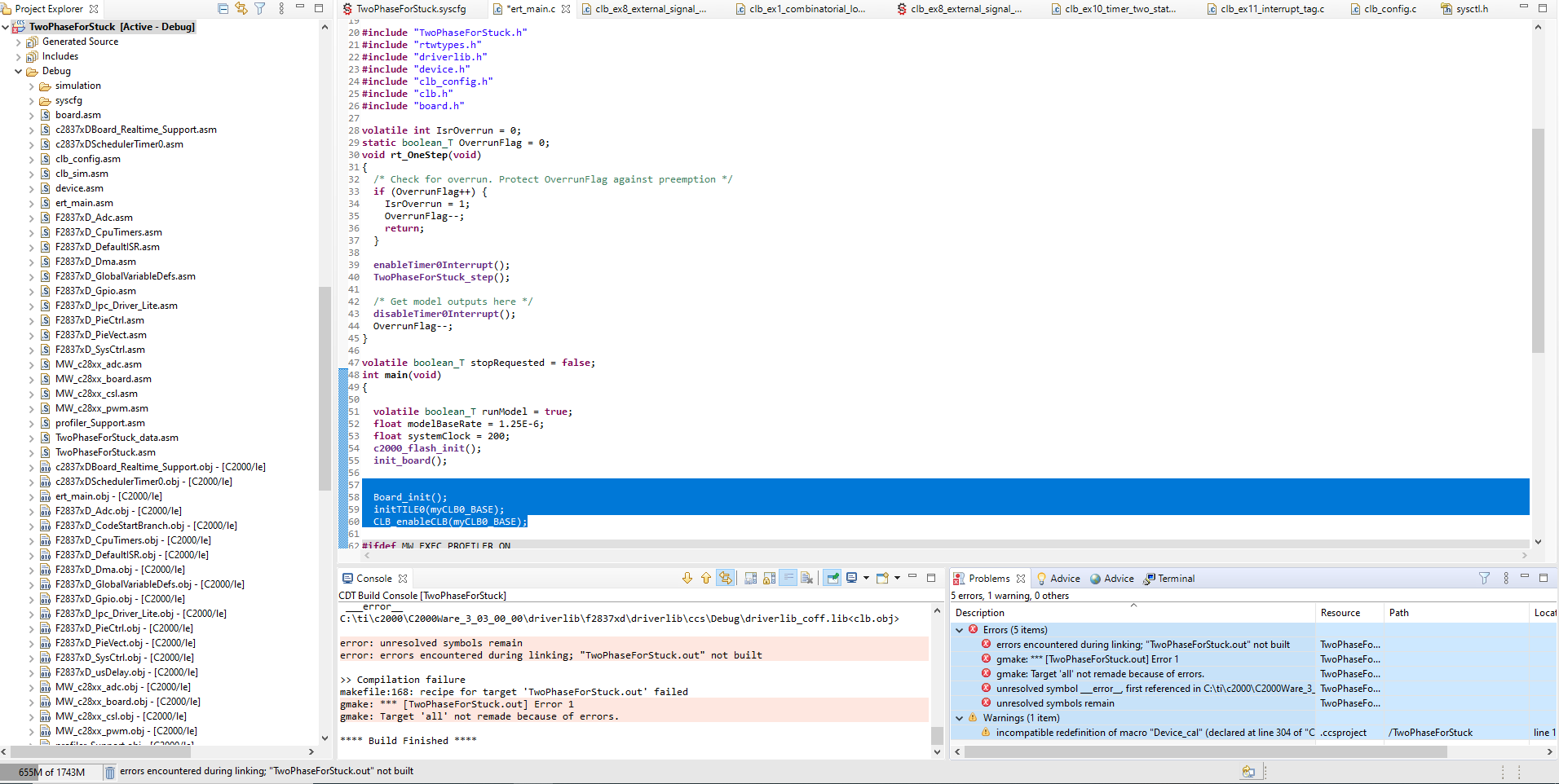
那么、请告诉我以下步骤是否正确?
此致、
穆罕默德