请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28335
尊敬的 TI 团队:
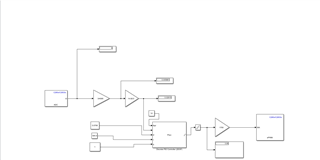
在 Matlab Simulink 平台中的 TMS320F28335微控制器的帮助下、我正在设计闭环系统内的降压转换器
当我在开环系统中运行降压转换器时、它运行良好、由 F28335生成的 ePWM 大约为20kHz。但我的输出电压不正确。
我们的额定值为24伏输入、12伏直流输出、20kHz 开关频率。
现在、当我在闭环中运行该系统时、问题就会出现、因此对于闭环、我使用的是 Simulink 类型的 PID 控制器块、
当我运行不带 DSP 的 Simulink 模型时、它运行正常、我已以离散形式调整了 P 和 I 值。
但是、当我尝试在硬件基础上实施时、连接 ADC 块以测量输出电压并馈送到微控制器、然后使用一些增益值和夏季模块来获得与参考点(恒定模块)相关的误差差异。
当我尝试运行一个模型并将代码放入 DSP 中时、这个问题出现在 PID 块中、它一直进入饱和点(0.95)。 因此、我的控制器运行缓慢。
有人在我做错的地方帮助我吗?
在这张图中,我当时没有运行块,它没有处于模拟模式。
但是、是的、当我运行模型或将代码转储到 DSP 中时、问题将以0.95 (饱和值)的值进入 PID 块。