请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
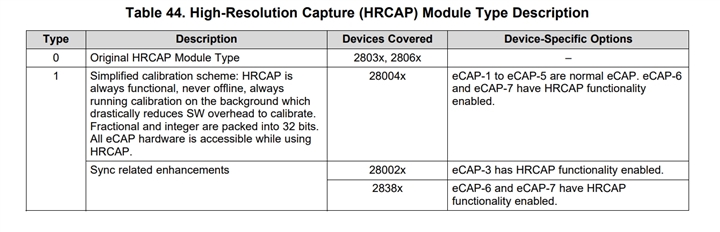
器件型号:TMS320F280049 大家好、
我已经在 这里询问了有关使用 HRCAP 进行精确频率测量的相关问题。
我想比较这三个模块(HRCAP、eCAP、eQEP)、以测量 方波的频率。
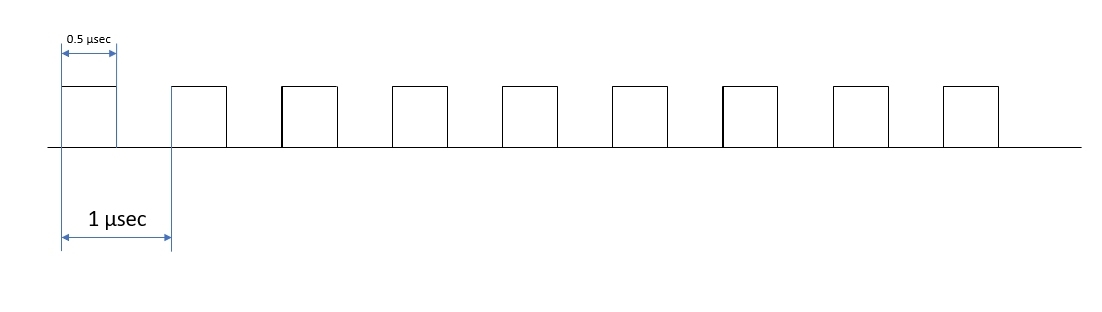
假设我们有一个占空比为50%的方波、运行频率为1-2MHz。 每个脉冲的宽度 取决于频率:0.25 μ s (2MHz 占空比为50%)至0.5 μ s (1MHz 占空比为50%)。
请参见下图、其中显示了测量的信号:
我的问题:
Q1:这些模块中的每个模块是否都可以用于测量此类信号?
Q2:每个模块在最小和最大输入频率、占空比等方面有哪些限制?
Q3:每个模块可实现的时序分辨率是多少?
对于 SPRAAH1 和 SPRU807B 中的 eCAP I 、其中 eCAP 的时序分辨率为1/SYSCLKOUT。 那么、eCAP 在100MHz SYSCLK 上具有10ns 的时序分辨率是否正确?
对于 HRCAP I、 SPRS945F (7.11.2.1)中的时序分辨率为450ps、测量时间大于5usec。
对于 eQEP、我找到 SPRSP14D (7.12.4-1)、 其中时序分辨率被指定为 2个 SYSCLK。 在这里、我不确定是什么是分辨率。
您能总结一下每个模块的输入频率要求吗?
感谢你的帮助。
谢谢、
Michael