请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-BUCKCONV 主题中讨论的其他器件:SFRA
您好!
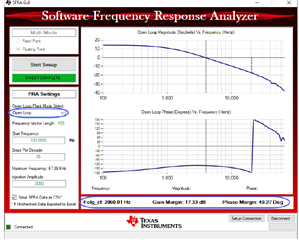
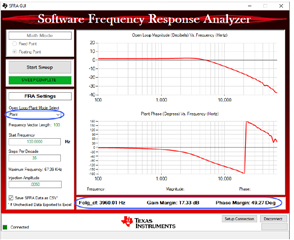
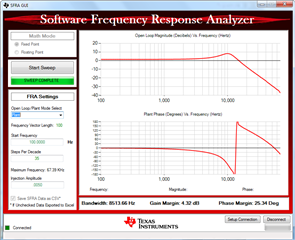
闭环 PCMC 的默认补偿为 Z0 = 0.0001kHz、Z1 = 25kHz 和 P1 = 3kHz。 我认为电流模式只需要1极点和1零即可进行补偿。 而 DCL22意味着两个极点和两个零。 您能否解释一下默认情况下使用的零点和极点值。 Z0值在这里意味着什么? 它太低。 在极点之后、Z1和 P1的值也似乎是奇数的。
此外、在 VMC 中、我只能在代码中看到两个零极和一个极点。 第二个极点放置在何处?
谢谢、
Ajit