请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSCNCD28388D 主题中讨论的其他器件: C2000WARE
大家好、Yashwant Temburu1
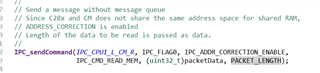
请告诉我。 在上述函数中、数据和地址通过 IPC 发送到 CM4内核。 我自己的数据被放置在以下数组 send_buff 中[150]。 我能否使用 send_buff 直接替换函数中的 packetData?
我在函数的注释中看到 packetData 对应于地址、packet_length 对应于数据。
这条评论让我有点困惑。
我当前的进展是、需要由 CPU1内核运行的项目已得到改进、并且 CM4内核的项目也已准备就绪。 接下来、只要 Web 服务中的 http 文件发生更改、CM4接收到的数据就可以通过以太网发送到计算机 IP 地址为192.168.0.4的网页、并实时显示?
谢谢
Vince