请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280049C 主题中讨论的其他器件: BOOSTXL-DRV8320RS
您好!
我将 LAUNCHXL-F280049C 与 BOOSTXL-DRV8320RS 搭配使用、以实现和测试 InstaSPIN FOC。 我对《InstaSPIN-FOC 实验指南》几乎没有疑问。
- 对于 PMSM 电机、InstaSPIN-FOC 是否会像 InstaSPIN-MOTION 那样识别电机惯性?
- 在 InstaSPIN-FOC 实验指南中、在实验06中为电流控制器进行 KP 和 KI 调优。
- 对于 Ki 增益计算:
- 根据实验指南中提到的公式、需要计算单位基准的 Ki 增益。
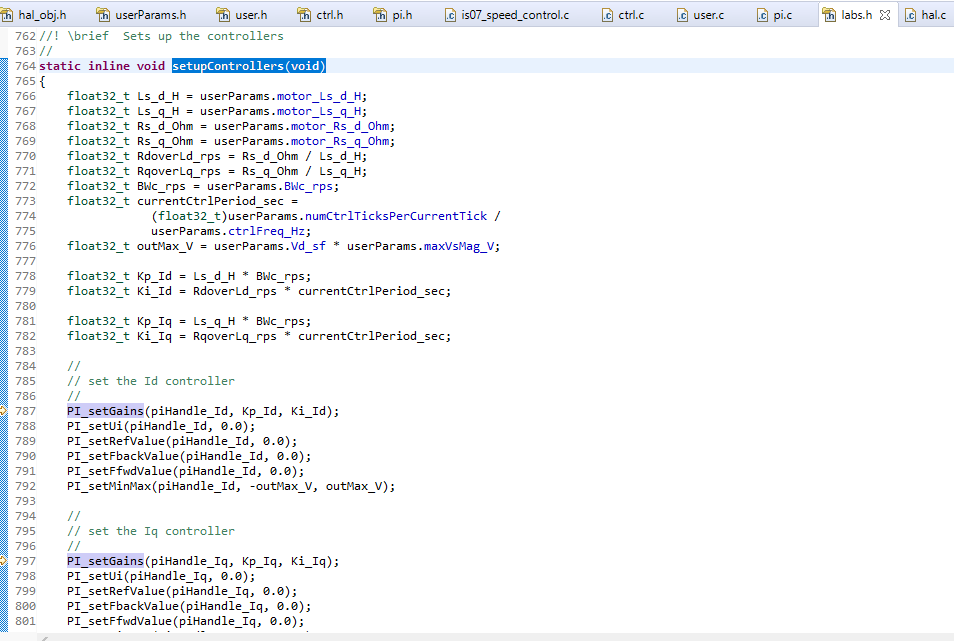
- 此计算与"Labs.h"文件中的函数 setupControllers (void)中设置控制器并产生类似结果的代码中的计算类似。
- 对于 KP 增益计算:
- 实验指南建议计算并使用 Kp 增益/单位基准。
- 但是、在"Labs.h"文件中的函数 setupControllers (void)中、代码不使用实验中提到的每单位计算。
- 对于 Ki 增益计算:
您能否解释一下实验室指南和实验室代码之间的这种差异? 我在计算中是否遗漏了一些东西?
最棒的
Amit