请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377S 工具/软件:Code Composer Studio
你好
我有一个与 ePWM 输出相关的问题。
两个控制板同步以控制电路。
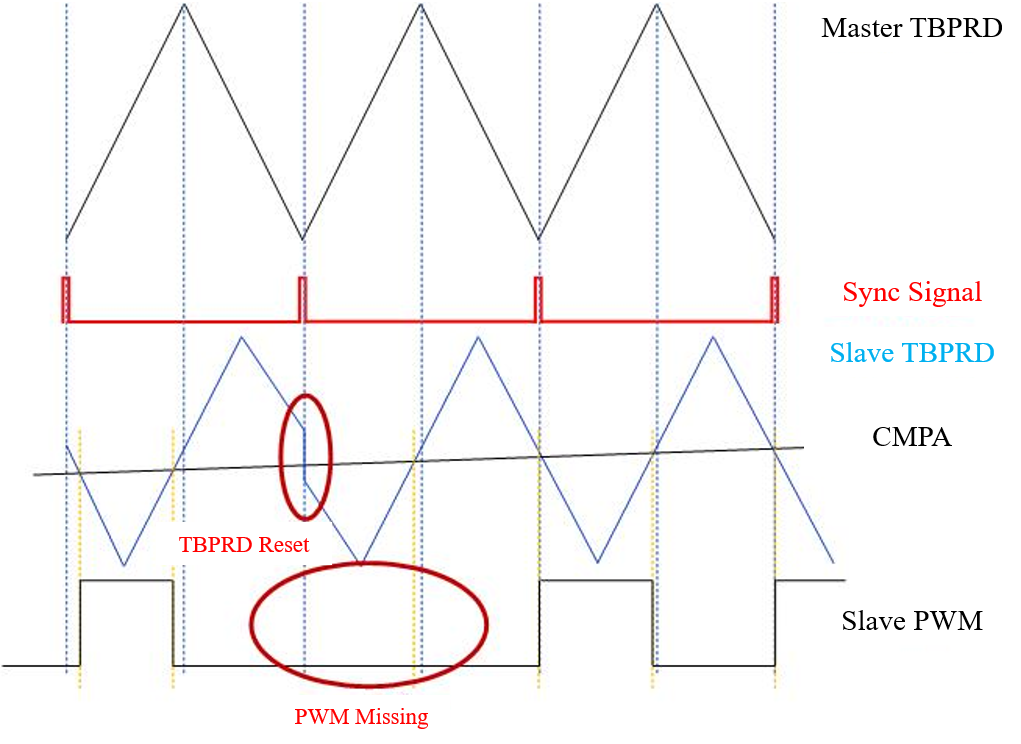
从电路板的相移为90度。
如图所示、当 SYNC 信号进入时、载波跳转且未输出占空比。
我想、这种现象是由振荡器的误差引起的。
它不会在每个开关周期中发生、而是随机发生。 但是、它是恒定的、它仅在相对于90度的0.5个占空比附近发生。
已确认可通过调整从机模块的 TBPRD 来避免这种情况。(主 TBPRD -1)
没有(TBPRD-1)、是否有办法解决问题?
或者是否有任何电路或寄存器可以补偿28377S 模块中的振荡器时钟误差?
感谢您阅读我的问题。