请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280049C 主题中讨论的其他器件:TMS320F28069、 MOTORWARE、 C2000WARE
您好!
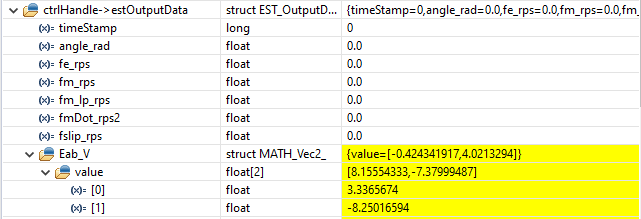
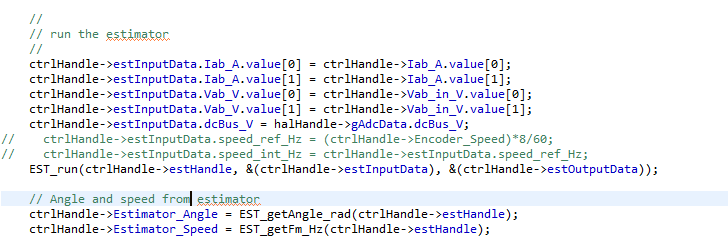
我们有一些软件可以利用 Instaspin 对 TMS320F28069微控制器进行无传感器电机控制(基于旧的 Motorware 示例项目)。 由于新功能和安全库、我们最近已将所有固件移至更新的 TMS320F28049C。 到目前为止、我已经成功地使大部分代码正常工作、但是无传感器估算器似乎不想工作。 这不是正确估算的结果、只是当我取消注释函数"EST_run"时、微控制器崩溃并跳转到"Interrupt_illegalOperationHandler"。 为什么会发生这种情况? 您能否指定使 FAST 观测器运行所需的函数? 这是我们从 Instaspin 中使用的唯一部件(我们不需要电机识别等)。
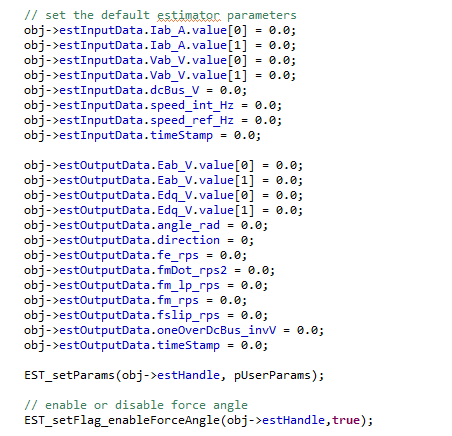
我已包含库"f28004x_fast_rom_symbols_fpu32.lib"、并查看了 C2000ware_Motor_Control 示例项目、但我未能找到问题的根源。 另一个有趣的效果是、一旦我包含文件"est.h"并尝试编译、我就会在该文件"EST_setupTraj"和"EST_configureCtrl"的2个函 数中看到错误"identifier CTRL_handle is undefined"、尽管我在 include 中有:#include "ctrl_obj.h"。 如果我简单地注释掉这两个函数、那么我的编译就可以了、但如前所述、当我取消注释"EST_run"时、程序会崩溃。
有什么想法吗?