请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280049C 您好!
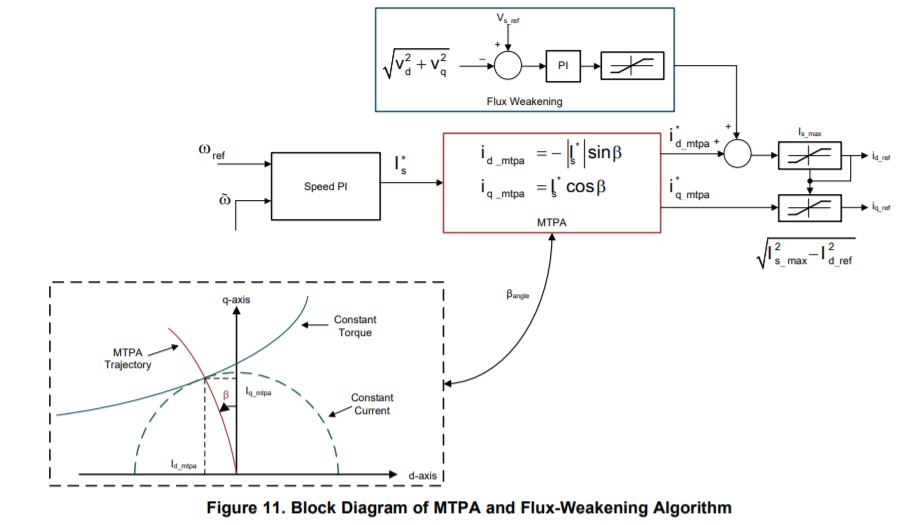
我对电机 SDK - is13_fwc_MTPA 的实验13有疑问。 本文档提到以下内容:

我了解场强减弱和 MTPA 代码、但我不能得到的是获取 β 的方法。
如果场强减弱的 PID 回路生成一些输出、则表示 Vs (sqrt (Vd^2 + Vq^2))已达到 vs_ref (Vdc/sqrt (3))。 我们是否不会通过等待 BETA_FW > BETA_MTPA 来延迟磁通减弱?
我认为测试值应为:BETA_MTPA + BETA_FW。 如果我错过了什么、请告诉我。