请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280049C 主题中讨论的其他器件: BOOSTXL-DRV8320RS、 C2000WARE、 DRV8320
你好。
我有一个带有 BOOSTXL-DRV8320RS 的 LAUNCHXL-F280049C,并尝试完成《适用于 F28004xC 的 InstaSPIN-FOC 实验指南》的所有步骤,但我卡在 is02_OFFSET_GAIN_CAL (CPU 的偏移/增益校准)。
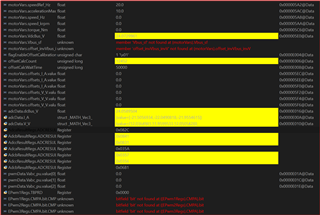
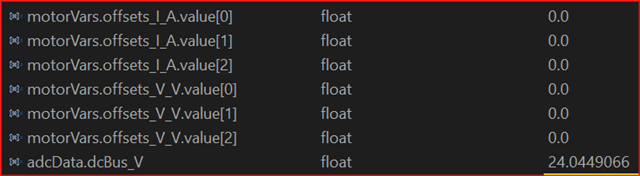
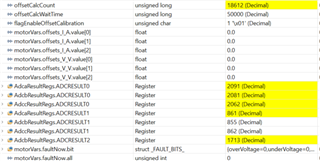
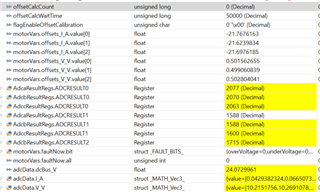
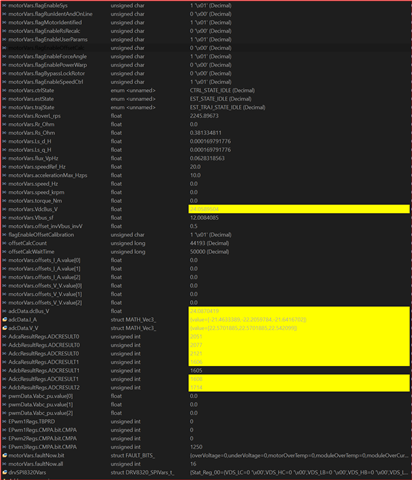
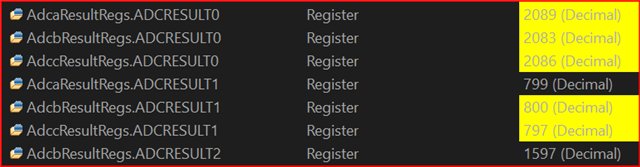
当我将 motorVars.flagEnableSys 设置为1时,表达式监视窗口中没有任何 PWM 比较寄存器(CMPA)值。 相反,在((EPwm1Regs.CMPA).bit、(EPwm2Regs.CMPA).CMPA).bit 和(EPwm3Regs.CMPA).bit 和(EPwm3Regs.CMPA)中找不到„bitfield‘bit'。位错误和最终偏移值在 motorVars.offsetVs.offset1和 offsetV 后不会更新 motorVars.I 偏移值。
在附件中、有一个包含这些错误的表达式监视窗口的屏幕截图。
我使用的是 Code Composer Studio 版本:12.1.0.00007和 C2000Ware_MotorControl_SDK_4_01_00_00。 并尝试在两台不同的计算机上工作、一台使用 Windows 11 Pro、另一台使用 Windows 10 Pro。 这两个问题是相同的。