请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28035 主题中讨论的其他器件:C2000WARE
CAN 位时序配置
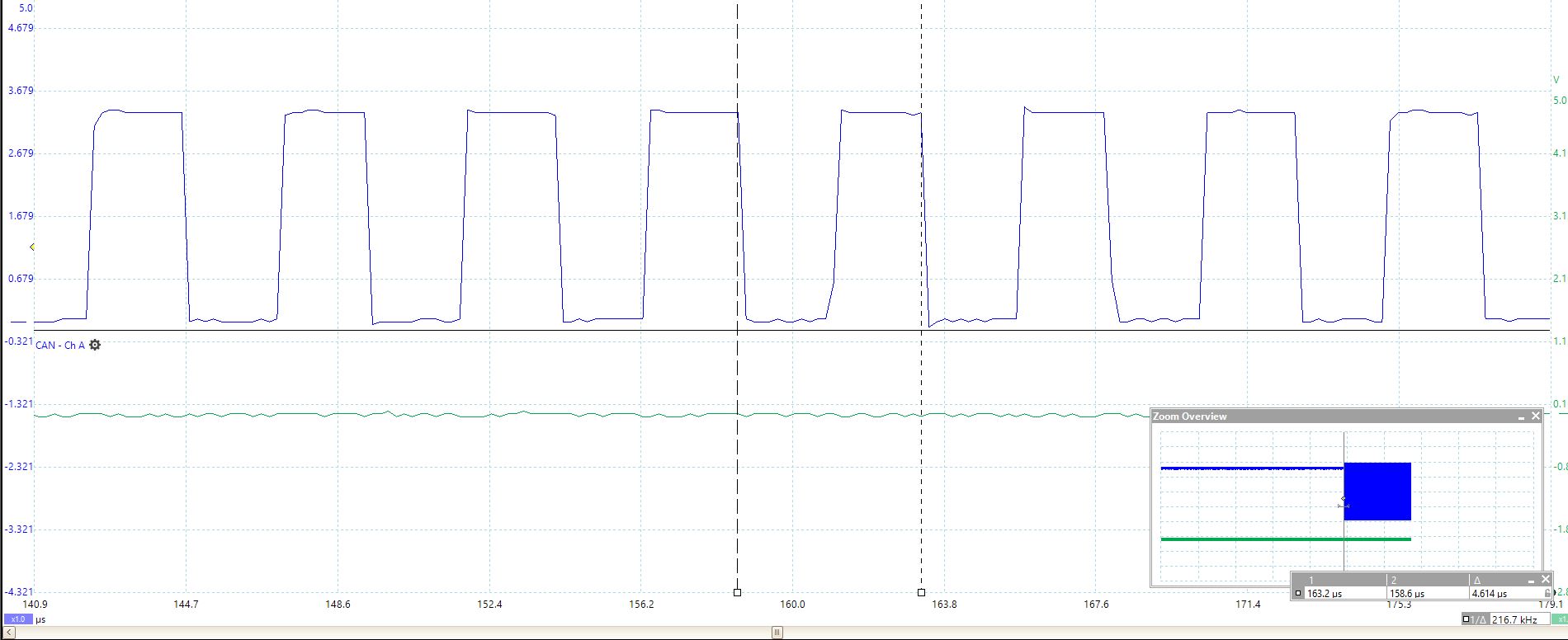
我在500kHz 时使用28379并使用 CANBitRateSet (CANB_BASE、200000000、50000)设置速率。
那么、为了为28035设置相同的波特率、我应该为 Setup 准备寄存器。
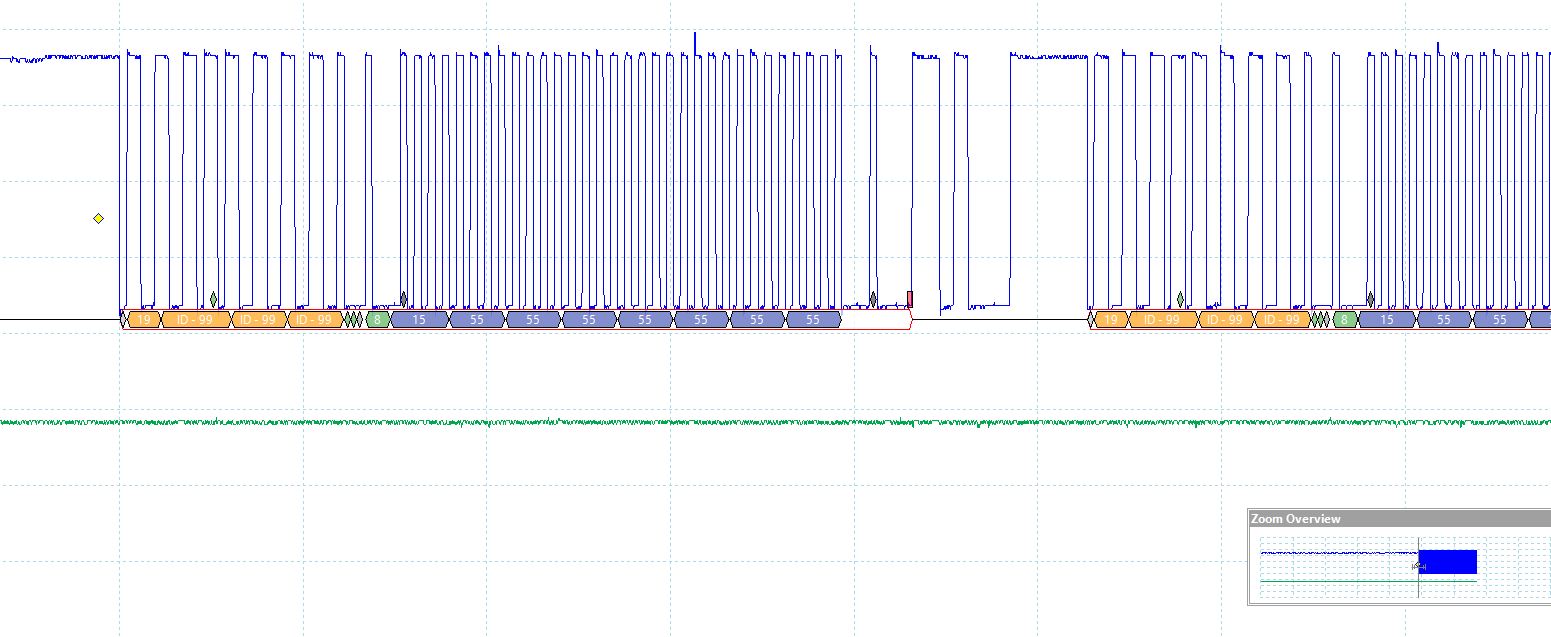
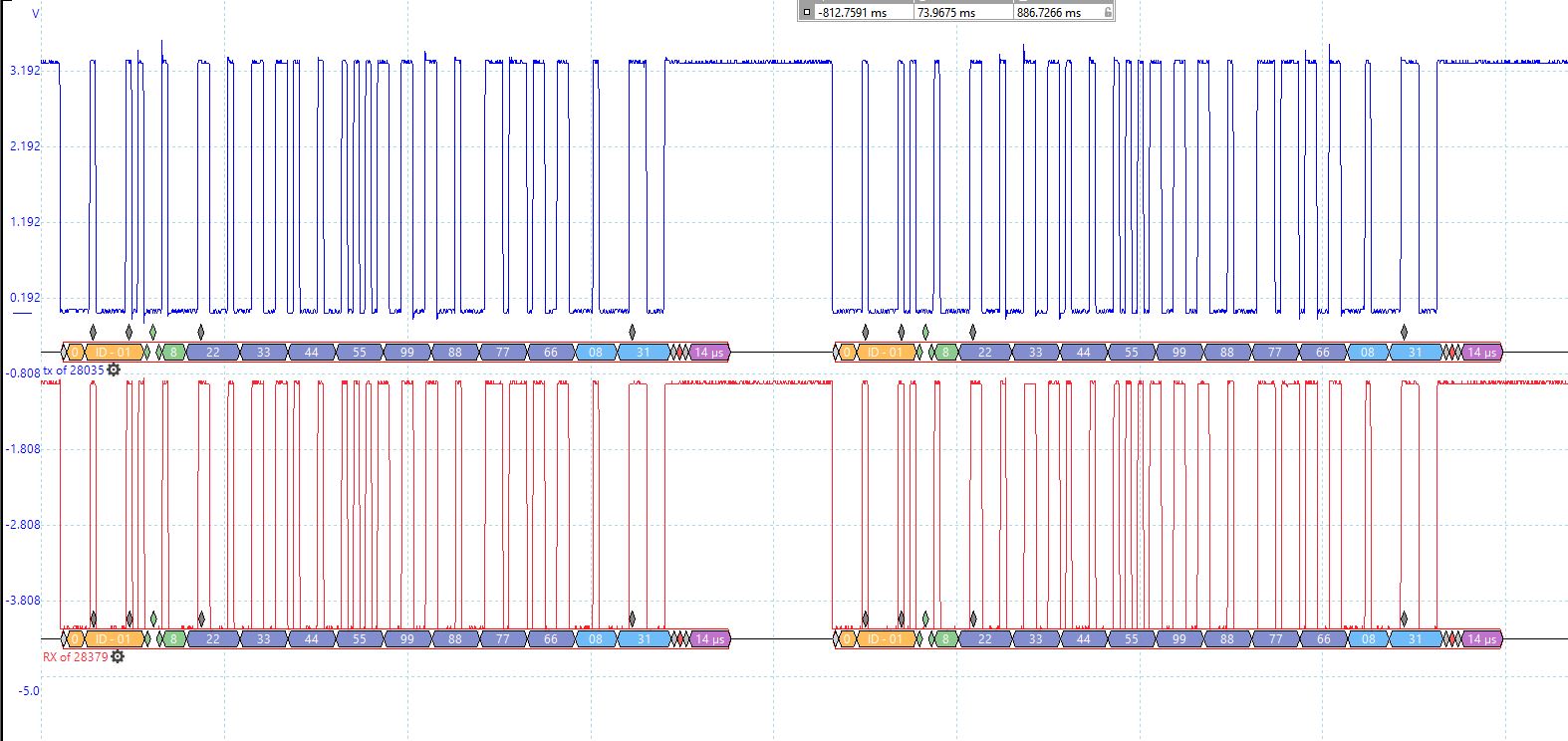
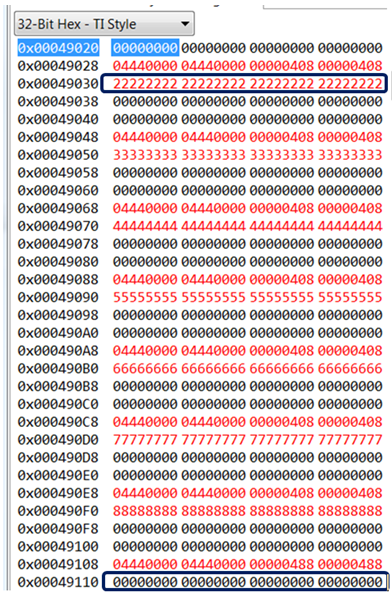
我觉得波特率设置不正确、因为我 在邮箱25上从28035发送了8个字节到28379、但在 Rx 中断的28379代码中、我总是得到错误位设置。 我认为我可能没有正确设置波特率。 您能验证一下 吗? 谢谢
ECanaShady.CANBTC.bit.BRPREG = 6;
ECANaShady.CANBTC.bit.TSEG2REG = 1;
ECANaShady.CANBTC.bit.TSEG1REG = 6;