Other Parts Discussed in Thread: CONTROLSUITE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8312-69M-KIT
您好!
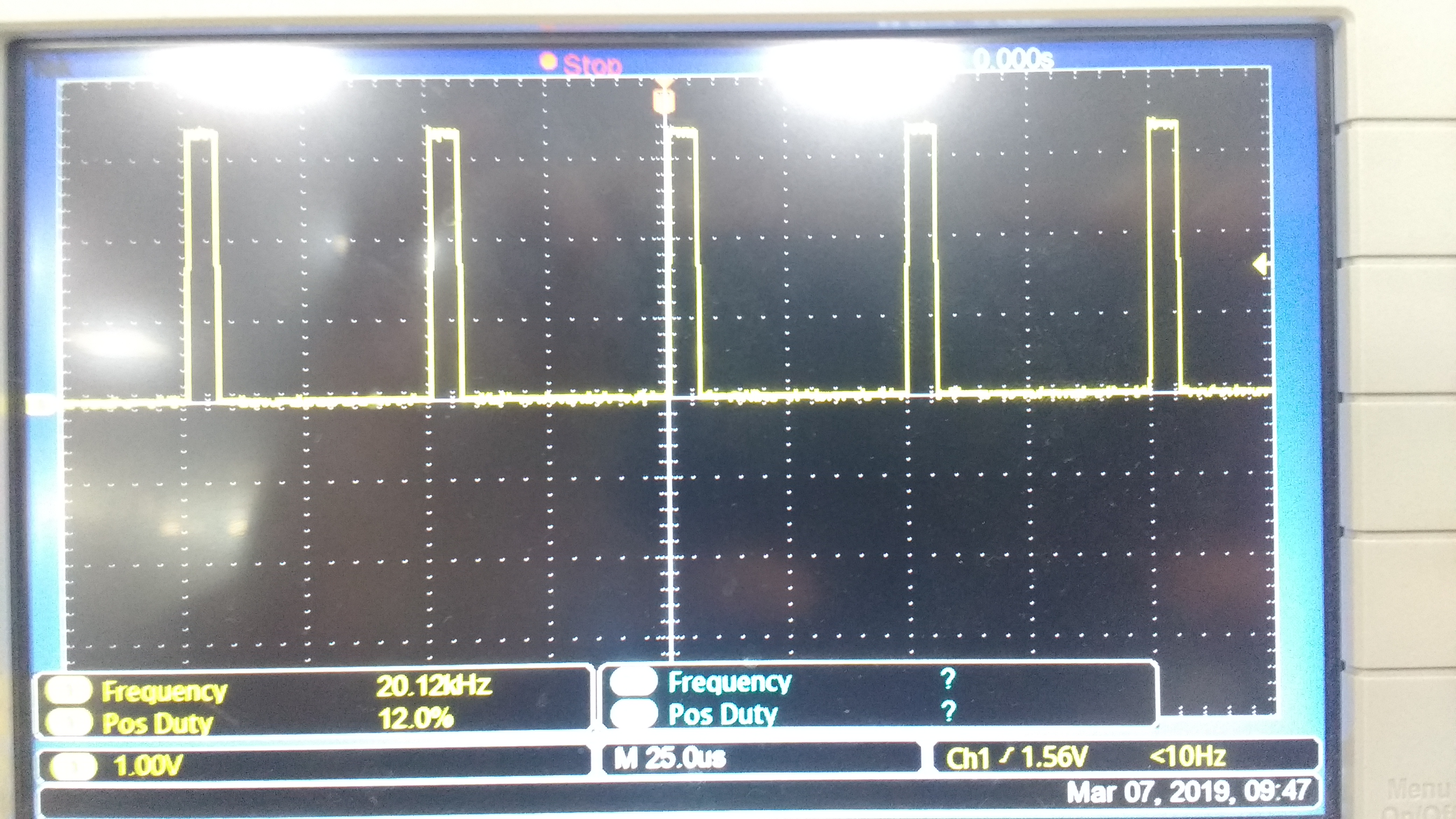
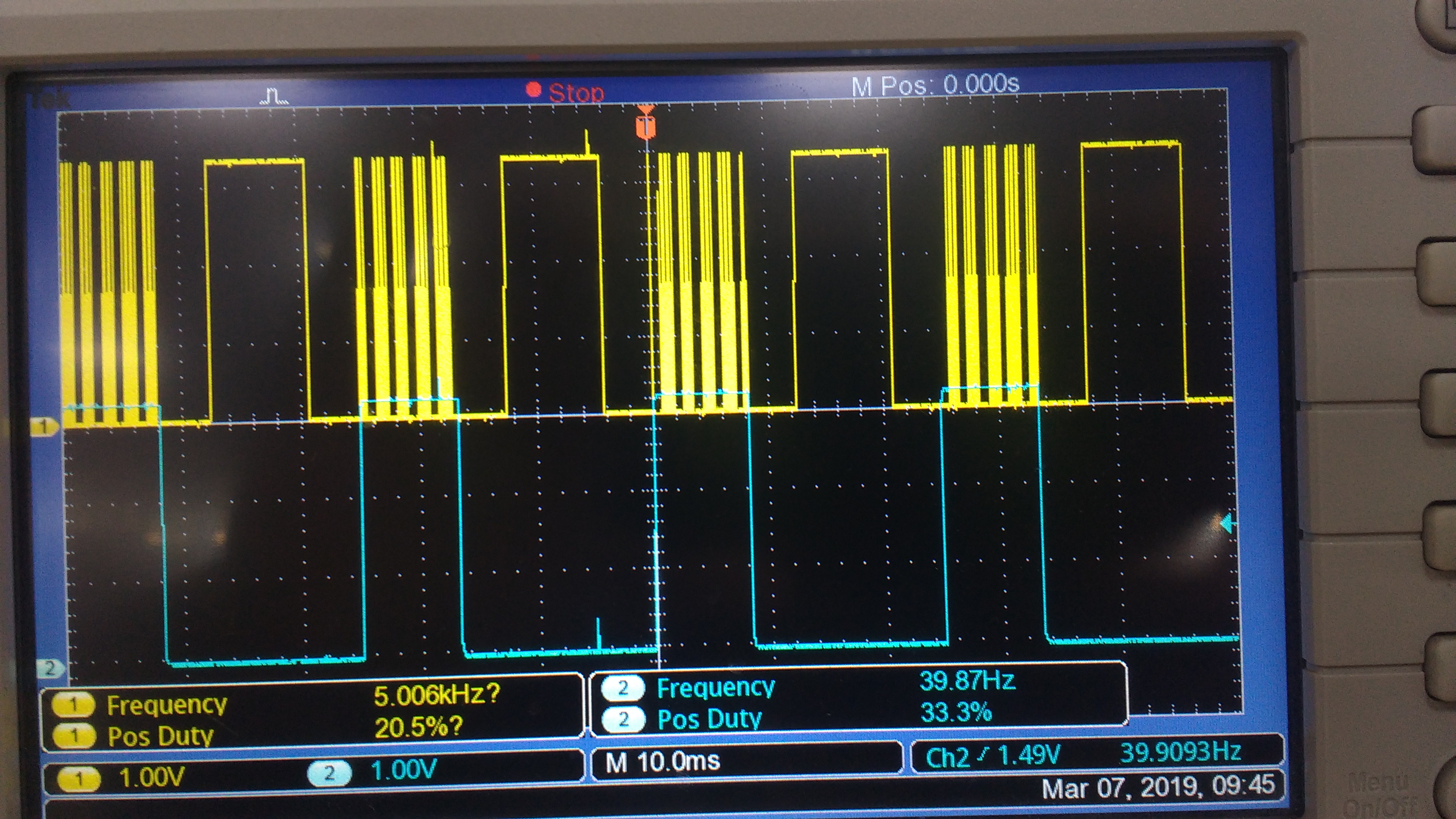
我使用的是具有2806xISO 控制卡的 DRV8312-69M-KIT。 我正在运行来自 ControlSuit 的示例代码 BLDC_Sensored。 所有构建级别(LEVEL1至 LEVEL6)均成功运行。 我的问题是、根据 PWM 配置、PWM 开关频率设置为20kHz、但输出波形中的实际 PWM 频率以 Hz 为单位。 该频率是如何变化的?