

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28035 Thread 中讨论的其他器件:controlSUITE
您好!
我正在评估 HFI 库、并让我的系统在某些问题上正常工作。 一种是过渡到/过渡到 HFI 和 eSMO 角度估算。 我将代码基于 HVPM_Enhanced_Sensorless 项目。
Transition1.SPD = RC1.SetpointValue;
Transition1.angleHFI = hfi1.thetaEst;
Transition1.angleSMO = esmo1.Theta;
角度_传输(&Transition1);
Speed2.估算 Theta =瞬态1.angle;
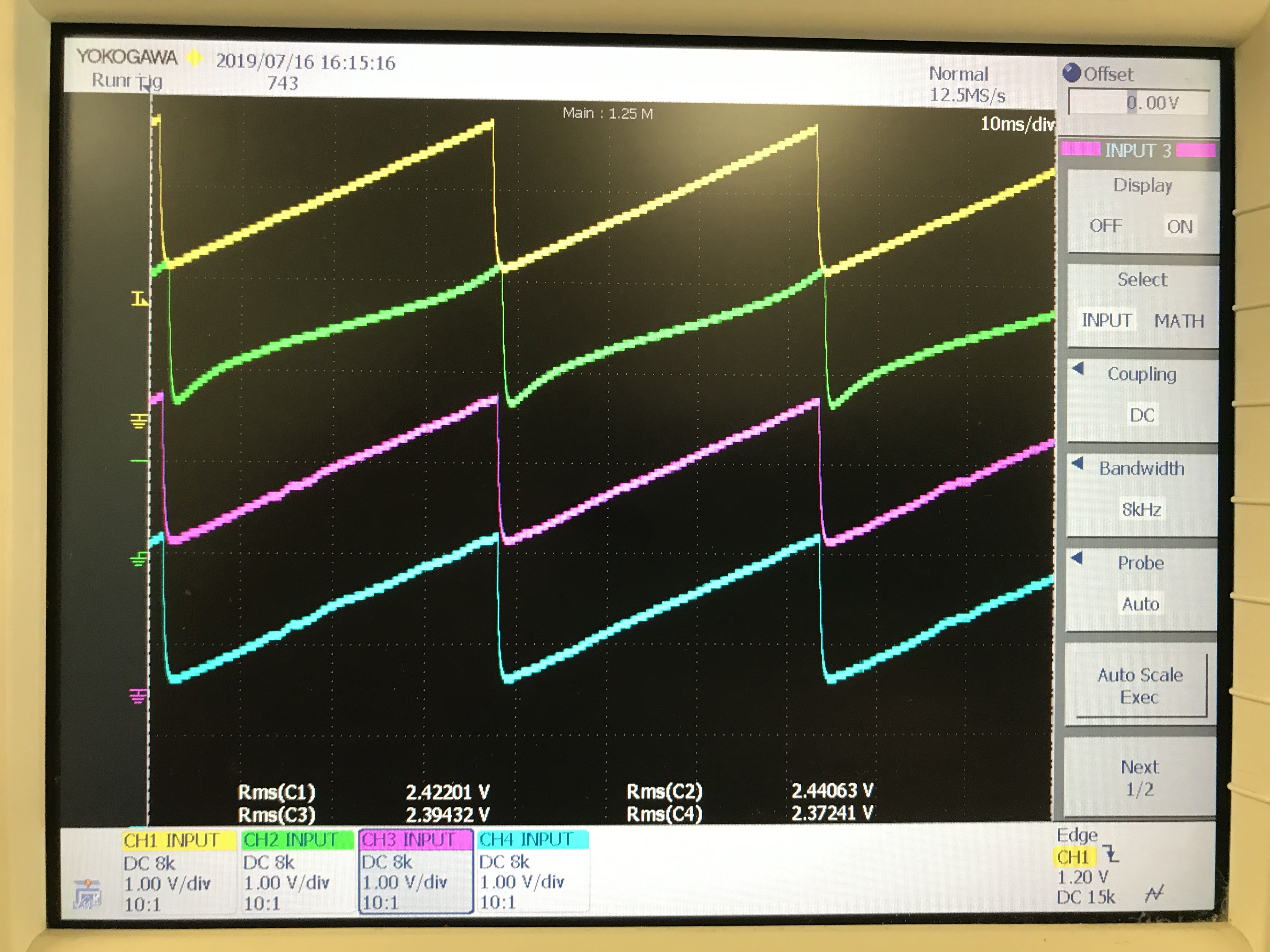
通常、系统从 HFI 转到 eSMO 没有问题、但在转换回 HFI 算法时会变得不稳定。 我通过 DAC 输出观察编码器角度(黄色)、eSMO 角度(绿色)、HFI 角度(洋红色)和 Transition1.angle (青色)。 在 HFI 控制下看到的情况。
切换到 eSMO 控制后、我注意到 HFI 角度变得不稳定、并会丢失、如下所示。 也许这就是过渡不起作用的原因。

我还尝试在编码器反馈下操作系统、并查看 HFI 估算角度、在相同情况下、HFI 角度就在这里。 HFI 解决方案收敛的唯一时间是它实际用作换向时。
问题:
1) 1)这是预期行为吗?
2) 2)在编码器控制下是否有并行执行 HFI 的方法?
感谢您的帮助。 谢谢!
