尊敬的所有人: 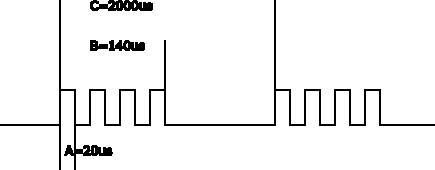
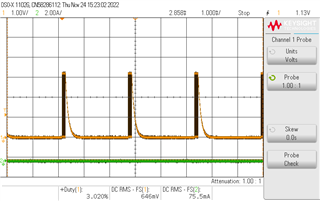
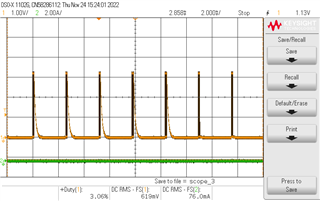
我需要在通道2和3中生成 PWM、如图所示。
我将 PWM 频率设置为20us。PWMA 和 PWM b 需要相互补充。B 和 C 时序是使用计时器模块完成的、如代码所示。
有两个问题。
A.当我禁用 PWM 时、我需要 A 和 B 通道都拉低。 但是、这种情况并未发生。
b.是否有更好的方法来实现上述逻辑。
以下是代码。
#include "DSP28x_Project.h"//器件头文件和示例 include 文件
//此文件中找到的函数的原型语句。
void InitEPwm1Examples(void);
中断 void epwm1_ISR (void);
中断空 CPU_timer0_ISR (空);
中断 void epwm2_ISR (void);
中断 void epwm3_ISR (void);
uint32 discharge 周期=2000;
uint32 discharge 占空比= 140;
uint32 count_discharge 周期= 1;
uint32 count_discharge 占空比= 1;
void main (void)
{
//步骤1. 初始化系统控制:
// PLL、安全装置、启用外设时钟
//此示例函数位于 DSP2802x_SYSCTRL.c 文件中。
InitSysCtrl();
//步骤2. 初始化 GPIO:
//此示例函数位于 DSP2802x_GPIO.c 文件和中
//说明了如何将 GPIO 设置为其默认状态。
// InitGpio();//针对此示例跳过
//在这种情况下、只需初始化 ePWM1、ePWM2、ePWM3的 GPIO 引脚
//这些函数位于 DSP2802x_ePWM.c 文件中
InitEPwm1Gpio();
InitEPwm2Gpio();
InitEPwm3Gpio();
//步骤3. 清除所有中断并初始化 PIE 矢量表:
//禁用 CPU 中断
Dint;
//将 PIE 控制寄存器初始化为默认状态。
//默认状态为禁用所有 PIE 中断和标志
//被清除。
//此函数位于 DSP2802x_PIECTRL.c 文件中。
InitPieCtrl();
InitCpuTimer();//对于此示例,只初始化 CPU 计时器
//禁用 CPU 中断并清除所有 CPU 中断标志:
IER = 0x0000;
IFR = 0x0000;
//使用指向 shell 中断的指针初始化 PIE 矢量表
//服务例程(ISR)。
//这将填充整个表,即使是中断也是如此
//在本例中未使用。 这对于调试很有用。
//可以在 DSP2802x_DefaultIsr.c 中找到 shell ISR 例程
//此函数可在 DSP2802x_PieVect.c 中找到
InitPieVectTable();
//此示例中使用的中断被重新映射到
//此文件中的 ISR 函数。
EALLOW;//这是写入 EALLOW 受保护寄存器所必需的
PieVectTable.EPWM1_INT =&epwm1_ISR;
PieVectTable.EPWM2_INT =&epwm2_ISR;
PieVectTable.EPWM3_INT =&epwm3/ISR;
EDIS;//这是禁止写入 EALLOW 受保护寄存器所必需的
//此示例中使用的中断被重新映射到
//此文件中的 ISR 函数。
EALLOW;//这是写入 EALLOW 受保护寄存器所必需的
PieVectTable.TINT0 =&CPU_timer0_ISR;
EDIS;//这是禁止写入 EALLOW 受保护寄存器所必需的
//步骤4. 初始化器件外设。 该函数可以是
//可在 DSP2802x_CpuTimers.c 中找到
#IF (CPU_FRQ_60MHz)
//将 CPU 定时器0、1和2配置为每秒中断一次:
// 60MHz CPU 频率,1秒周期(以 μ 秒为单位)
ConfigCpuTimer (&CpuTimer0、60、1);
#endif
//步骤4. 初始化所有器件外设:
//此函数位于 DSP2802x_InitPeripherals.c 中
// InitPeripherals ();//此示例不需要
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC=0;
EDIS;
InitEPwm1Examples();
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC=1;
EDIS;
//启用连接到 EPWM1-3 INT 的 CPU INT3:
// IER |= M_INT3;
//启用连接到 CPU 定时器0的 CPU INT1,
IER |= M_INT1;
//在 PIE 中启用 TINT0:组1中断7
PieCtrlRegs.PIEIER1.bit.INTx7=1;
//在 PIE 中启用 ePWM INTn:组3中断1-3
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
PieCtrlRegs.PIEIER3.bit.INTx2 = 1;
PieCtrlRegs.PIEIER3.bit.INTx3=1;
//启用全局中断和更高优先级的实时调试事件:
EINT;//启用全局中断 INTM
ERTM;//启用全局实时中断 DBGM
//为了确保精确的时序,使用只写指令写入整个寄存器。 因此、如果有的话
配置位的//在 ConfigCpuTimer 和 InitCpuTimers (在 DSP2802x_CpuTimer.h 中)中更改、
//下面的设置也必须更新。
CpuTimer0Regs.TCR.ALL = 0x4001;//使用只写指令将 TSS 位设置为0
//步骤5. 特定于用户的代码、启用中断:
//启用全局中断和更高优先级的实时调试事件:
EINT;//启用全局中断 INTM
ERTM;//启用全局实时中断 DBGM
//步骤6. 空闲循环。 只需坐下来循环(可选):
for (;;)
{
asm (" NOP");
}
}
中断空 epwm1_ISR (空)
{
EPwm1Regs.ETCLR.bit.INT = 1;
//确认此中断以接收来自组3的更多中断
PieCtrlRegs.PIEACX.ALL = PIEACK_Group3;
}
中断空 epwm2_ISR (空)
{
EPwm2Regs.ETCLR.bit.INT = 1;
//确认此中断以接收来自组3的更多中断
PieCtrlRegs.PIEACX.ALL = PIEACK_Group3;
}
中断空 epwm3_ISR (空)
{
EPwm3Regs.ETCLR.bit.INT = 1;
//确认此中断以接收来自组3的更多中断
PieCtrlRegs.PIEACX.ALL = PIEACK_Group3;
}
中断空 CPU_timer0_ISR (空)
{
if (count_discharge <DISCHARGE_DUTY && count_discharge_period<=DISCHARGE_PERIOD))
{
count_discharge 占空比= count_discharge 占空比+ 1;
COUNT_DELOAD_PERIOD=COUNT_DELOAD_PERIOD+1;
}
否则、如果(COUNT_DELOAD_DUTY >= DELOAD_DUTY &&<DISCHARGE_PERIOD)
{
COUNT_DELOAD_PERIOD=COUNT_DELOAD_PERIOD+1;
EPwm3Regs.TBCTR = 0x0000;
EPwm2Regs.TBCTR = 0x0000;
}
否则、如果(COUNT_DELOAD_Duty= DELOAD_DUTY & COUNT_DELOAD_PERIOD=DELOAD_PERIOD)
{
COUNT_DELOAD_DUTY = 1;
COUNT_DELOAD_PERIOD=1;
EPwm3Regs.AQCTLA.bit.PRD = AQ_SET;
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm3Regs.AQCTLB.bit.PRD= AQ_CLEAR;
EPwm3Regs.AQCTLB.bit.CAU = AQ_SET;
EPwm2Regs.AQCTLA.bit.PRD = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.CAU = AQ_SET;
}
// CpuTimer0.InterruptCount++;
//确认此中断以从组1接收更多中断
PieCtrlRegs.PIEACX.ALL = PIEACK_Group1;
}
空 InitEPwm1Examples()
{
// ePWM 模块1配置
EPwm1Regs.TBPRD = 500;//周期= 1201 TBCLK 计数
EPwm1Regs.TBPHS.Half.TBPHS = 0;//将相位寄存器设置为零
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//非对称模式
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE;//相位加载被禁用
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;// TBCLK = SYSCLKOUT //如果不包含代码中的内容,则默认频率变为一半
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm1Regs.AQCTLA.bit.PRD = AQ_SET;
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CAU = AQ_SET;
EPwm1Regs.CMPA.half.CMPA = 250;
//低电平有效 PWM -设置死区
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL;
EPwm1Regs.DBRED = 20;
EPwm1Regs.DBFED = 20;
//EPwm1_DB_DIRECTION = DB_UP;
//中断,我们将在其中更改死区
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO;//选择零事件时的 INT
EPwm1Regs.ETSEL.bit.INTEN = 1;//启用 INT
EPwm1Regs.ETPS.bit.INTPRD = et_3rd;//在第三个事件发生时生成 INT
// EPWM2配置
EPwm2Regs.TBPRD = 1200;//周期= 1201 TBCLK 计数
EPwm2Regs.TBPHS.Half.TBPHS = 0;//将相位寄存器设置为零
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//非对称模式
EPwm2Regs.TBCTL.bit.PHSEN = TB_DISABLE;//相位加载被禁用
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;// TBCLK = SYSCLKOUT //如果代码中不包含此内容,则默认频率变为一半
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm2Regs.AQCTLA.bit.PRD = AQ_SET;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.CAU = AQ_SET;
EPwm2Regs.CMPA.half.CMPA = 600;
//低电平有效 PWM -设置死区
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL;
EPwm2Regs.DBRED = 20;
EPwm2Regs.DBFED = 20;
//EPwm1_DB_DIRECTION = DB_UP;
////中断,我们将在其中更改死区
// EPwm2Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO;//选择零事件时的 INT
// EPwm2Regs.ETSEL.bit.INTEN = 1;//启用 INT
// EPwm2Regs.ETPS.bit.INTPRD = et_3rd;//在第3个事件发生时生成 INT
// EPWM3配置
EPwm3Regs.TBPRD = 1200;//周期= 1201 TBCLK 计数
EPwm3Regs.TBPHS.Half.TBPHS = 0;//将相位寄存器设置为零
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//非对称模式
EPwm3Regs.TBCTL.bit.PHSEN = TB_DISABLE;//相位加载被禁用
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_DISABLE;
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;// TBCLK = SYSCLKOUT //如果代码中不包含此内容,则默认频率变为一半
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;// CTR 上的负载=零
EPwm3Regs.AQCTLA.bit.PRD= AQ_SET;
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm3Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm3Regs.AQCTLB.bit.CAU = AQ_SET;
EPwm3Regs.CMPA.half.CMPA = 600;
//低电平有效 PWM -设置死区
EPwm3Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
//EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL;
EPwm3Regs.DBRED = 20;
EPwm3Regs.DBFED = 20;
//EPwm1_DB_DIRECTION = DB_UP;
//中断,我们将在其中更改死区
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO;//选择零事件时的 INT
EPwm3Regs.ETSEL.bit.INTEN = 1;//启用 INT
EPwm3Regs.ETPS.bit.INTPRD = et_3rd;//在第三个事件发生时生成 INT
//启用 TZ1和 TZ2作为一个逐周期触发源
EALLOW;
EPwm2Regs.TZFRC.bit.CBC = 1;
EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm2Regs.TZCTL.bit.TSB = TZ_FORCE_LO;
EPwm3Regs.TZFRC.bit.CBC = 1;
EPwm3Regs.TZCTL.bit.TZA = TZ_FORCE_LO;
EPwm3Regs.TZCTL.bit.TSB = TZ_FORCE_LO;
EDIS;
}
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//不再需要。
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================