请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28027F 主题中讨论的其他器件:DRV8301
你好
我通过处理从 lab10到我的项目所需的代码来实现当前的重建。
但现在电机电流不稳定、电机产生更多噪声。
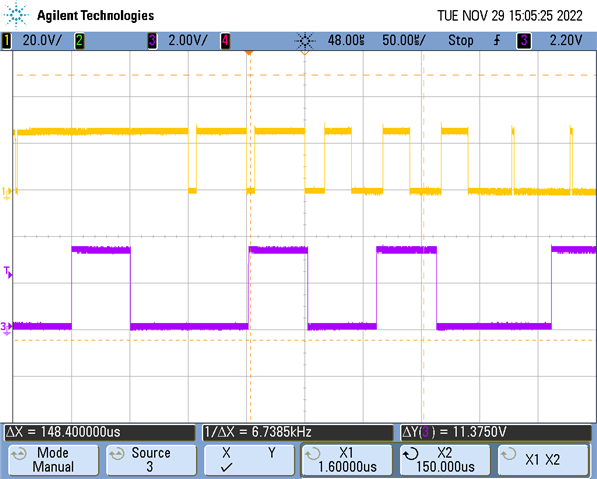
主 ISR 似乎不再以稳定的10KHz 速率运行、但中断缺失或相互触发两次。 即使所有三个电流都可用。
因此、下一个触发器的计算似乎有问题。
黄色/绿色:PWM 输出蓝色:在主 ISR 执行期间为高电平
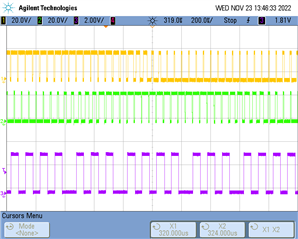
3000 rpm、所有电流均可用
黄色/绿色:PWM 输出蓝色:在主 ISR 执行期间为高电平
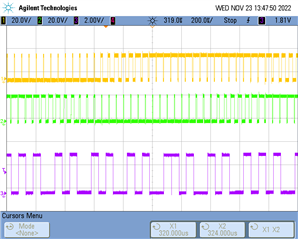
5000 rpm、并非所有电流都始终可用。
主 ISR 的执行时间~50us 中断速率应为10kHz (100us)
有什么想法如何解决这个问题?