

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:TMDSRSLVR您好 Yanming、大家好、
我们将 Lab5a 与旋转变压器反馈结合使用。 电角计算基于 TI 旋转变压器数字转换器套件硬件和固件。
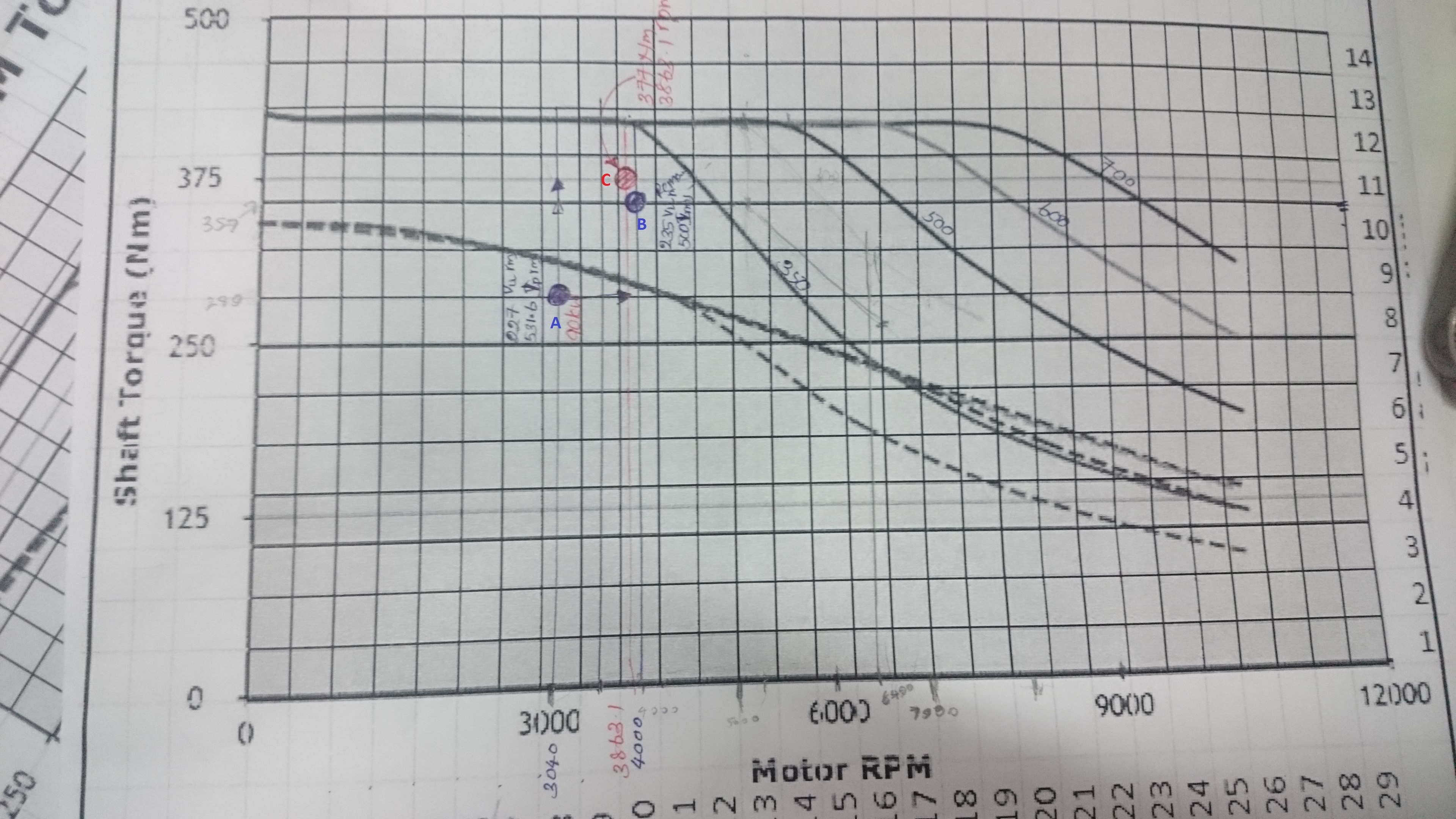
我们以227Vrms (线对线)和531Arms (相位)运行电机。 当时、电机转矩为289Nm (轴输出)和3040rpm。 但是、根据电机的数据表、此时应考虑扭矩常数和反电动势常数、从而达到377Nm、3863rpm。 我们的损耗接近50kW。
但我们不能进一步增加转速或线路电压(根据当时的电池电压305Vdc、我们似乎达到了基极转速)。
我们已经从电机制造商那里获得了测试数据。 它们以35Vrms (线对线)和500Arms (相位)的355Nm、4000rms 输出运行电机。
点 A (蓝色)-当前工作点(227Vrm、531Arm)
点 C (红色)- 点 A 的工作点、227Vrm、531Arm、符合电机数据表。 (使用电机常数 ke 和 kt 计算)
B 点(蓝色)-电机制造商提供的235Vrms、500Arms 测试数据
导致此不匹配的原因是什么?
谢谢你
