

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28069M 尊敬的 SpinTAC 团队:
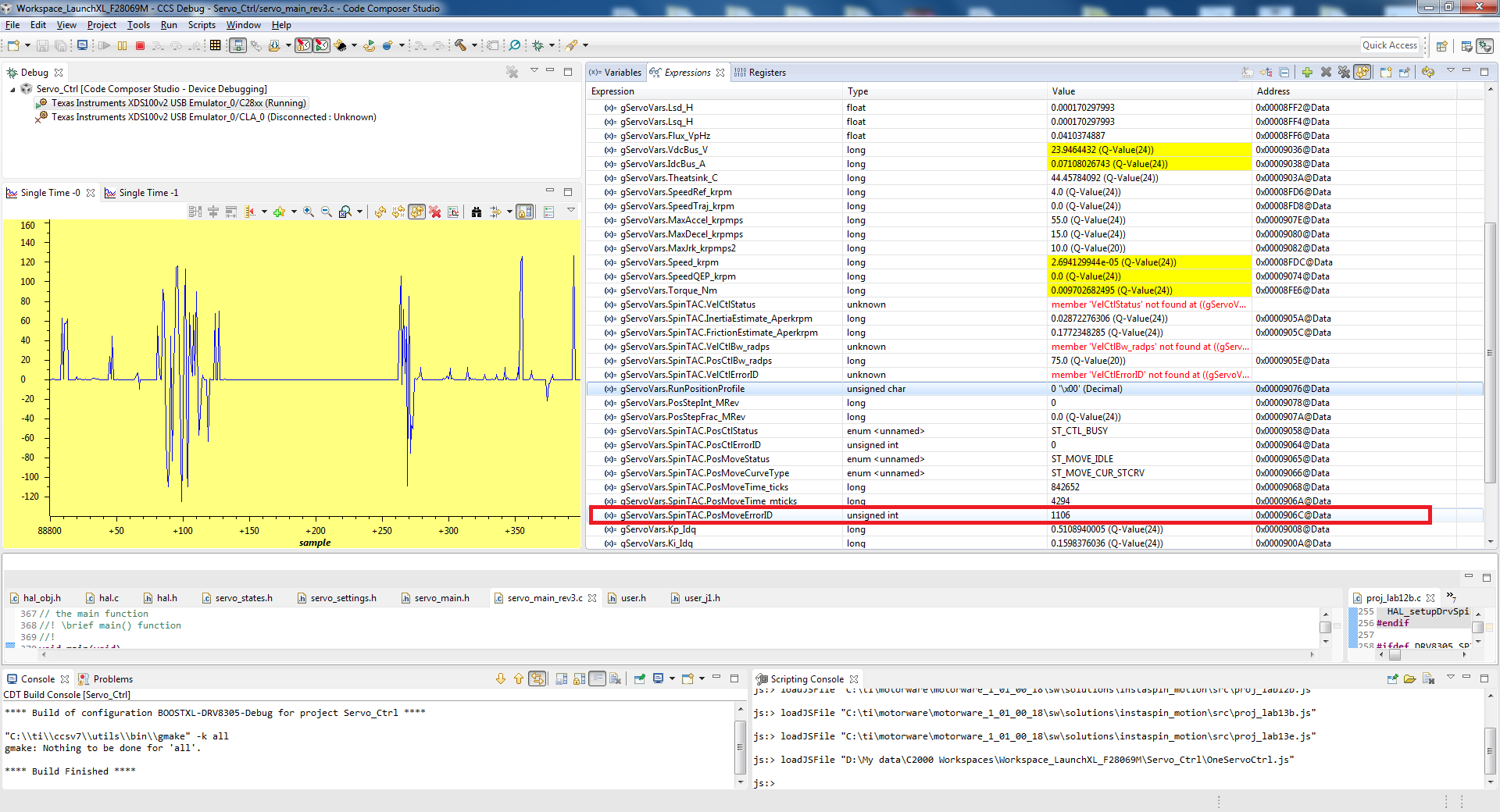
我正在与 PRJ_lab13b 和 PRJ_lab13e 合作、以非常低的速度控制 PMSM 电机。 当我尝试 使用另一个通过 无传感器 FOC 成功控制的电机 PRJ_lab13b 时、我遇到以下错误、错误代码#1106
我查找了该错误代码的含义、但在 SPRUHJ1F 文档中仅描述了错误1105。 那么、请让我了解错误代码的含义是什么?
谢谢!
