请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
你好。 我想使用 C2000Ware 中的汇编函数 DCL_PI_A1.asm。 它是 PI 控制的函数、可用于 TMS320F28035等定点处理器。 我找不到任何使用此函数的示例工程、并且不确定如何使用它。 有人可以提供一些指导吗?
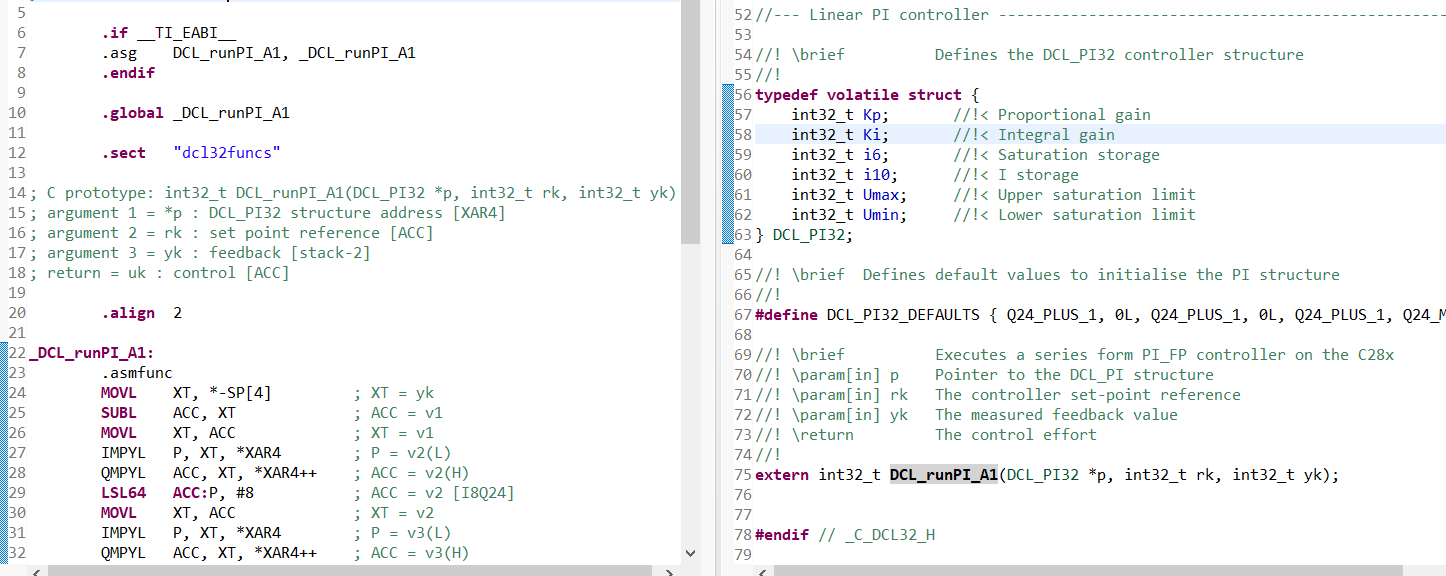
汇编函数代码和 DCL32.h 头文件如下图所示。 在调用汇编函数之前,我是否需要自己将*p 放在 XAR4中,将 rk 放在 ACC 中,将 YK 放在[STACK-2]中? 还是在其他地方完成? 我还需要做什么其他事情? 我已经阅读了 DCL 用户指南 PDF、但它并未提供有关如何使用这些函数的大量信息。