

大家好、
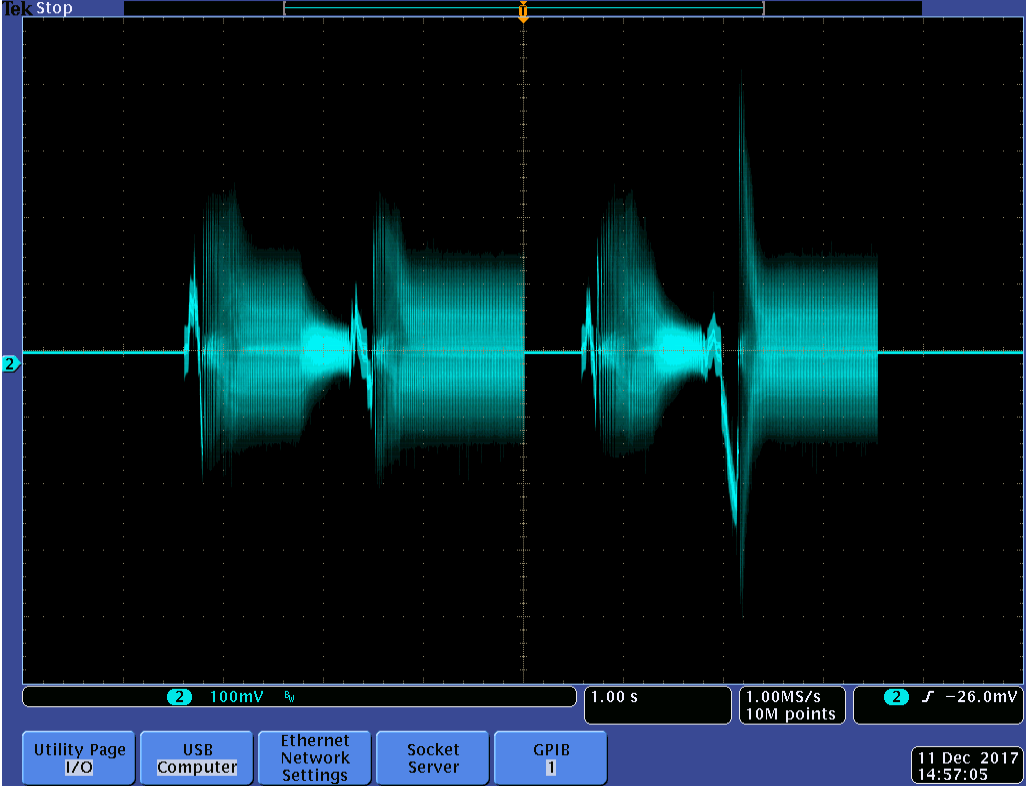
我的电机是230 BLDC 电机。 当我设置电机速度时、电机在启动时有时会发生电流过冲。
然后是电子器件的保护电路触发器
我将 PROJ_LAB05e 与该电机参数结合使用。
#define USER_SYSTEM_BANTANG带宽 (10.0)
#define USER_MOTOR_TYPE Motor_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_RR (空)
#define USER_MOTOR_Rs (1.38470221)
#define USER_MOTOR_LS_d (0.0027)
#define USER_MOTOR_LS_q (0.0027)
#define USER_MOTOR_Rated 磁通( 0.8508)
#define USER_MOTOR_磁 化电流 (空)
#define USER_MOTOR_RES_EST_CURRENT (6.0)
#define USER_MOTOR_IND_EST_CURRENT (空)
#define USER_MOTOR_MAX_CURRENT (40.00)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (5.0)
#define USER_MOTOR_MAX_SPEED_KRPM (3.0)
#define USER_SYSTEM_惯性 (0.06704008579)
#define USER_SYSTEM_FRIC滑动 (-0.09187704325)
通过 Lab5c、我了解了惯性和摩擦值。
摩擦力是否被否决是正确的?
您能给我一个建议、为什么我在启动时有时会过冲。
谢谢
Alex

{kind=link}