请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:TMDSHVMTRPFCKIT你(们)好
我使用 的是 TMDSHVMTRPFCKIT v2.1。
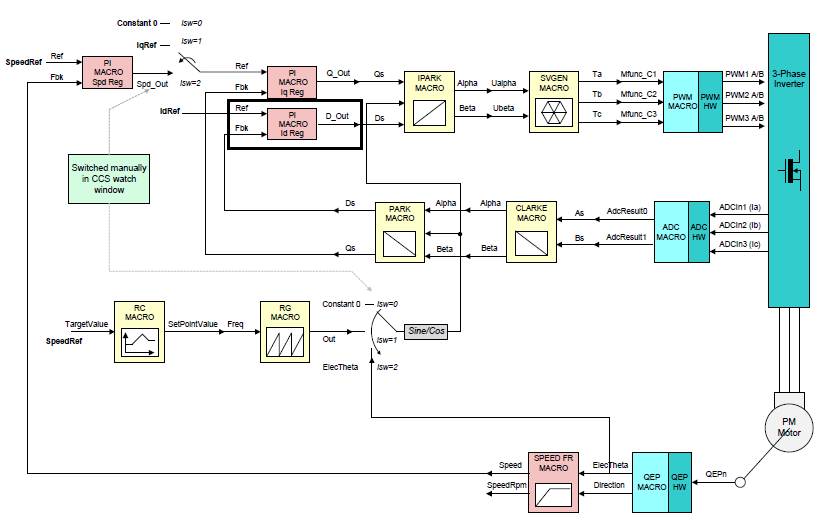
当 SpeedRef 为 Constant_Iq (0.333)时、每次我转动电机时、D 轴电流 PI 宏输出值变为近似值 -0.02至-0.05。
为什么会发生这种情况? 我无法理解。 Q 轴输出几乎是恒定的。
因此、我无法从电流 PI 输出计算精确的 Vd 值。
请解释为什么会发生这种情况!