主题中讨论的其他器件:TMS320F28379D
工具/软件:Code Composer Studio
您好!
我已经制作了一个代码来生成三相 PWM 和 H 桥 PWM 信号、下面是我的代码。
三相 PWM 信号(ePWM 1 - 3)应彼此同步、而 H 桥 PWM 信号(ePWM 4 - 5)应彼此同步。
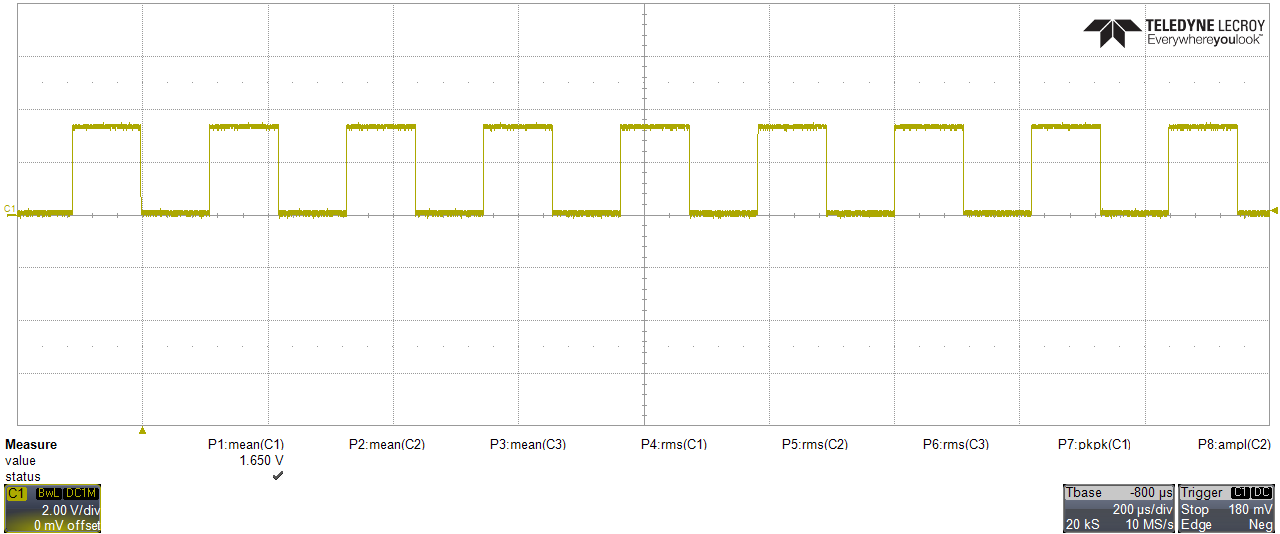
三相 PWM 信号的基波频率为250Hz、开关频率为25kHz。
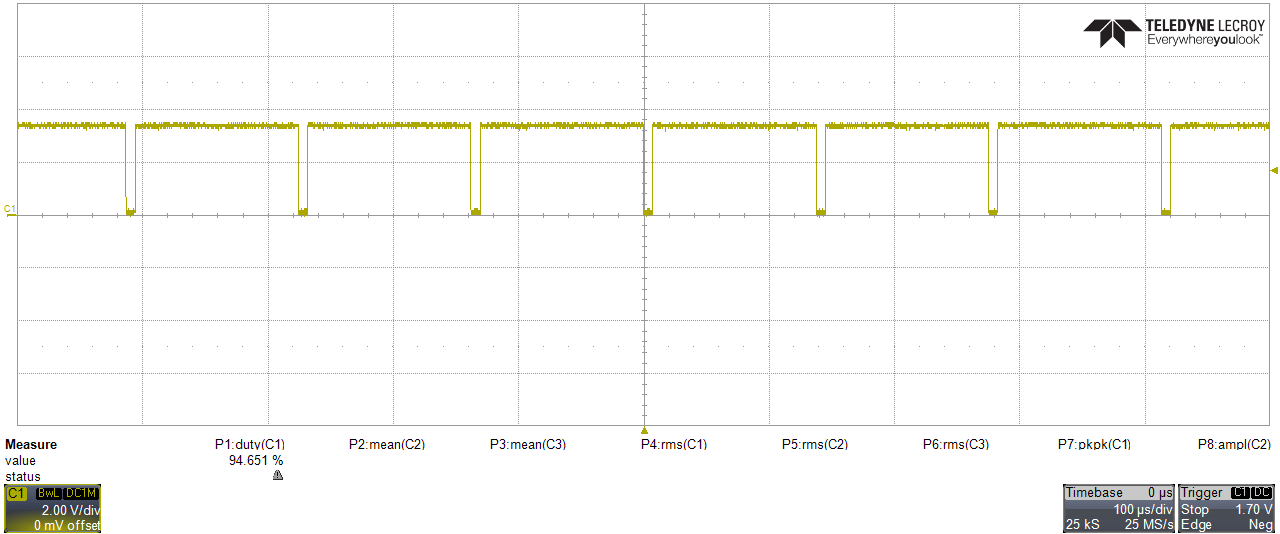
H 桥 PWM 信号使用相移控制、开关频率为100kHz。
现在我有三个问题:
(1)如果我正确理解 TMS320F28379D 的数据表、则系统时钟为200MHz。 TMS320F28379D 的数据表还显示:对于100MHz 以上的 SYSCLK、EPWMCLK 必须是 SYSCLKOUT 的一半、这意味着如果 SYSCLKOUT=200MHz、ePWM 时钟应该为100MHz。 但是、如果我将 TBCTL.bit.HSPCLKDIV 和 TBCTL.bit.CLKDIV 都设置为1、那么 ePWM 时钟是否会被强制为200MHz?
此外、在我的代码中、我将 TBCTL.bit.HSPCLKDIV 和 TBCTL.bit.CLKDIV 都设置为1、如果 ePWM 时钟实际上是100MHz、 由于我需要25kHz 的开关频率、因此 ePWM 周期寄存器应设置为100 [MHz]/ 25 [kHz]/ 2 = 2000 (上-下计数模式)。 但是、它提供的开关频率为12.5kHz、因此我必须将 ePWM 周期寄存器设置为1000、才能获得25kHz 的开关频率。 这让我感到困惑。 为什么会这样呢?
(2)我尝试更新计数器=零时生成的 EPWM1 ISR 函数中的三相占空比。 每次调用 ISR 函数时、都会添加相移、以便电压基准矢量以250Hz 的频率旋转。
如果我设置 EPwm1Regs.ETPS.bit.INTPRD = et_3rd、这意味着每三个事件生成一次 INT、那么基频为正确的250Hz (每次调用 ISR 时、电压矢量相移都是上一个事件的3倍)。 但是、如果我将 EPwm1Regs.ETPS.bit.INTPRD 降低至 et_1st、即中断在每个开关周期发生、那么基频变得更低。
但是、如果我将 EPwm1Regs.ETPS.BIT.INTPRD 保持在 et_1st 并将开关频率降低至10kHz、即中断频率也降低至10kHz、那么基频就会变为正确的。
我认为这可能是因为中断功能太耗时、DSP 无法在一个开关周期内处理、从而导致一些中断同时丢失。 但是、我认为中断功能不是很长、由于 DSP 工作频率为200MHz、中断频率为25kHz、这意味着可以在一个开关周期内执行8000个计算步骤、我认为这应该远远超过要求。
对此有何解释和解决方案?
(3) ePWM 4和5根据"TMS320x280x 增强型脉宽调制器(ePWM)模块参考指南(SPRU791)"第3.9章 ZVSFB 转换器进行编程。 但是、EPWM4A 和5A 始终提供3.3V 电压、而 EPWM4B 和5B 始终提供0V 电压。这对我来说非常令人困惑。 希望有人能向我解释一下。
非常感谢!
//######################################################################################################################
//
//文件:ePWM_F5_channel.c
//
//三相 SVPWM
// 25kHz
//相位 A - EPWM1
//相位 B - EPWM2
//相位 C - EPWM3
//
// H 桥相移
// 100kHz
//相位 A - EPWM4
//相位 B - EPWM5
//
//######################################################################################################################
//包含的文件
//
#include "F28x_Project.h"
#include "math.h"
//######################################################################################################################
//定义
#define PI 3.141592653579793
#define two_PI 6.283185307179586
#define two_pi_over_three 2.094395102393195
#define sqrT_2 1.414213562373095
#define sqrT_3 1.732050807568877
//######################################################################################################################
//全局变量
//
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
//直流链路电压
float32 u_dc = 48;//[V]
//α-β 坐标系中的电压基准
float32 u_ref_alpha;//[V]
float32 u_ref_beta;//[V]
float32 u_ref_angle;//[rad]
float32 u_ref_amp;//[rad]
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
//三相逆变器 PWM
float32 f_믹 놾= 250;//[Hz]
float32 f_sw_thine_phase = 25e3;//[Hz]
//周期:递增和递减计数
uint16 N_three PHASE_SW_PERIOD = 1000;// ePWM 周期寄存器:n_three PHASE_SW_PERIOD = 100 [MHz]/25[kHz]/2 = 2000
//死区
uint16 N_th3_PHASE_DEADBADAND = 25;//死区寄存器:n_th3_PHASE_DEADBAND = 500 [ns]* 100 [MHz]/2 = 25
// PWM 基准更新
uint16 N_th3_PHASE_UPDATE = 1;//
// PWM 占空比:1表示100%
float32 Duty_sw[3];
//调幅指数:1表示100%
float32 m_a = 0.9;
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
// SinePWM 或 SVPWM?
// 1:SinePWM
// 2:SinePWMTriangularInjection
// 3:SVPWM
uint16 PWM_Algorithm = 3;
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
// SinePWMTriangularInjection
float32 u_ref_abc_max、u_ref_abc_min;
float32 u_try_ref;//三角注入
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
// SVPWM
uint16 sector_sVPWM;
float32 Duty_SVPWM[3];
float32 u_ref_amp_SVPWM;
float32 u_ref_ang_SVPWM;
float32 u_ref_alpha_SVPWM;
float32 u_ref_beta_SVPWM;
// SVPWM 表
//[章节][a 或 b][状态]
UINT16 V_SVPWM_BASILE[6][2][3]=
{
//扇区1
{
{1、0、0}、//向量 A:相位 A B C
{1、1、0}//向量 B:相位 A B C
}、
//扇区2.
{
{0、1、0}、//向量 A:相位 A B C
{1、1、0}//向量 B:相位 A B C
}、
//扇区3.
{
{0、1、0}、//向量 A:相位 A B C
{0、1、1}//向量 B:相位 A B C
}、
//扇区4.
{
{0、0、1}、//向量 A:相位 A B C
{0、1、1}//向量 B:相位 A B C
}、
//扇区5.
{
{0、0、1}、//向量 A:相位 A B C
{1、0、1}//向量 B:相位 A B C
}、
//扇区6.
{
{1、0、0}、//向量 A:相位 A B C
{1、0、1}//向量 B:相位 A B C
}、
};
///%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
// H 桥逆变器 PWM
float32 f_sw_h_bridge = 100e3;//[Hz]
//周期:递增计数
uint16 N_H_BRIDGE_SW_PERIOD = 500;// ePWM 周期寄存器:n_H_BRIDGE_PERIOD = 100 [MHz]/100 [kHz]= 1000
//占空比
float32 Duty_H_bridge = 0.5;
uint16 N_H_BRIDGE_DUTY;
//死区
UINT16 N_H_BRIDGE_DEADBAND = 5;//死区寄存器:n_three 相位死区= 100 [ns]* 100 [MHz]/2 = 5
//######################################################################################################################
//函数原型
//
void InitEPwm1 (void);
空 InitEPwm2 (空);
空 InitEPwm3 (空);
void InitEPwm4 (void);
void InitEPwm5 (void);
_interrupt void epwm1_ISR (void);
//__interrupt void epwm2_ISR (void);
//__interrupt void epwm3_ISR (void);
//__interrupt void epwm4_ISR (void);
//__interrupt void epwm5_ISR (void);
void CurrentController (void);
void SinePWM (void);
void SVPWM (void);
void SinePWMTriangularInjection (void);
//######################################################################################################################
//索引
//
int16 i、j、k;
//
//
//主函
//
void main (void)
{
//
//步骤1. 初始化系统控制:
// PLL、安全装置、启用外设时钟
//此示例函数位于 F2837xD_SYSCTRL.c 文件中。
//
InitSysCtrl();
//
//步骤2. 初始化 GPIO:
//此示例函数位于 F2837xD_GPIO.c 文件和中
//说明了如何将 GPIO 设置为其默认状态。
//
InitGpio();
//
//启用 PWM1、PWM2、PWM3、PWM4、PWM5
//
CpuSysRegs.PCLKCR2.bit.EPWM1 = 1;
CpuSysRegs.PCLKCR2.bit.EPWM2 = 1;
CpuSysRegs.PCLKCR2.bit.EPWM3 = 1;
CpuSysRegs.PCLKCR2.bit.EPWM4= 1;
CpuSysRegs.PCLKCR2.bit.EPWM5=1;
//
//在这种情况下、只需初始化 ePWM1、ePWM2、ePWM3、ePWM4、ePWM5的 GPIO 引脚
//这些函数位于 F2837xD_ePWM.c 文件中
//
InitEPwm1Gpio();
InitEPwm2Gpio();
InitEPwm3Gpio();
InitEPwm4Gpio();
InitEPwm5Gpio();
//
//步骤3. 清除所有中断并初始化 PIE 矢量表:
//禁用 CPU 中断
//
Dint;
//
//将 PIE 控制寄存器初始化为默认状态。
//默认状态为禁用所有 PIE 中断和标志
//被清除。
//此函数位于 F2837xD_PIECTRL.c 文件中。
//
InitPieCtrl();
//
//禁用 CPU 中断并清除所有 CPU 中断标志:
//
IER = 0x0000;
IFR = 0x0000;
//
//使用指向 shell 中断的指针初始化 PIE 矢量表
//服务例程(ISR)。
//这将填充整个表,即使是中断也是如此
//在本例中未使用。 这对于调试很有用。
//可以在 F2837xD_DefaultIsr.c 中找到 shell ISR 例程
//此函数可在 F2837xD_PieVect.c 中找到
//
InitPieVectTable();
//
//此示例中使用的中断被重新映射到
//此文件中的 ISR 函数。
//
EALLOW;//这是写入 EALLOW 受保护寄存器所必需的
PieVectTable.EPWM1_INT =&epwm1_ISR;
EDIS;//这是禁止写入 EALLOW 受保护寄存器所必需的
//
//对于此示例,只初始化 ePWM
//
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC=0;
EDIS;
InitEPwm1();
InitEPwm2();
InitEPwm3();
InitEPwm4();
InitEPwm5();
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC=1;
EDIS;
//
//步骤4. 特定于用户的代码、启用中断:
//
//
//启用连接到 EPWM1-3 INT 的 CPU INT3:
//
IER |= M_INT3;
//
//在 PIE 中启用 ePWM INTn:组3中断1-3
//
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
//
//启用全局中断和更高优先级的实时调试事件:
//
EINT;//启用全局中断 INTM
ERTM;//启用全局实时中断 DBGM
//
//步骤5. 空闲循环。 只需坐下来循环(可选):
//
for (;;)
{
ASM (" NOP");
}
}
//
// InitEPwm1 -初始化 EPwm1配置
//
空 InitEPwm1 (空)
{
//
//设置 TBCLK
//
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//向上/向下计数
EPwm1Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE;//主模式
EPwm1Regs.TBPHS.bit.TBPHS = 0x0000;//相位为0
EPwm1Regs.TBCTR = 0x0000;//清除计数器
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;//无活动加载
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//同步下行数据流
//
//将影子寄存器加载设置为零
//
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
//设置比较值
//
EPwm1Regs.CMPA.bit.CMPA = Duty_SW[0];//设置比较 A 值
EPwm1Regs.CMPB.bit.CMPB = Duty_SW[0];//设置比较 B 值
//
//设置操作
//
EPwm1Regs.AQCTLA.bit.CAU = AQ_SET;//在递增计数期间设置事件 A 上的 Pwm1A
EPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR;//在递减计数期间清除事件 A 上的 Pwm1A
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR;//在递增计数期间清除事件 B 上的 Pwm1B
EPwm1Regs.AQCTLB.bit.CBD = AQ_SET;//在递减计数期间设置事件 B 上的 Pwm1B
//
//高电平有效互补 PWM -设置死区
//
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;//完全启用:同时启用 A 和 B
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补
EPwm1Regs.DBRED.bit.DBRED = N_three 相位死区;//上升沿高互补
EPwm1Regs.DBFED.bit.DBFED = N_three 相位死区;//下降沿高互补
//
//中断,我们将在其中更改比较值
//
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO;//在零事件时触发 INT ON
EPwm1Regs.ETSEL.bit.INTEN = 1;//启用 INT
EPwm1Regs.ETPS.bit.INTPRD = et_3rd;//在发生 N'n'事件时生成 INT
}
//
// InitEPwm2 -初始化 EPwm2配置
//
空 InitEPwm2 (空)
{
//
//设置 TBCLK
//
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//向上/向下计数
EPwm2Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE;//从机模式
EPwm2Regs.TBPHS.bit.TBPHS = 0x0000;//相位为0
EPwm2Regs.TBCTR = 0x0000;//清除计数器
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;//无活动加载
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;//同步直通
//
//将影子寄存器加载设置为零
//
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
//设置比较值
//
EPwm2Regs.CMPA.bit.CMPA = Duty_SW[1];//设置比较 A 值
EPwm2Regs.CMPB.bit.CMPB = Duty_SW[1];//设置比较 B 值
//
//设置操作
//
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET;//在递增计数期间设置事件 A 上的 Pwm2A
EPwm2Regs.AQCTLA.bit.CAD = AQ_CLEAR;//在递减计数期间清除事件 A 上的 Pwm2A
EPwm2Regs.AQCTLB.bit.CBU = AQ_CLEAR;//在递增计数期间清除事件 B 上的 Pwm2B
EPwm2Regs.AQCTLB.bit.CBD = AQ_SET;//在递减计数期间设置事件 B 上的 Pwm2B
//
//高电平有效互补 PWM -设置死区
//
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;//完全启用:同时启用 A 和 B
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补
EPwm2Regs.DBRED.bit.DBRED = N_three 相位死区;//上升沿高互补
EPwm2Regs.DBFED.bit.DBFED = N_three 相位死区;//下降沿高互补
}
//
// InitEPwm3 -初始化 EPWM3配置
//
空 InitEPwm3 (空)
{
//
//设置 TBCLK
//
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;//向上/向下计数
EPwm3Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm3Regs.TBCTL.bit.PHSEN = TB_ENABLE;//从机模式
EPwm3Regs.TBPHS.bit.TBPHS = 0x0000;//相位为0
EPwm3Regs.TBCTR = 0x0000;//清除计数器
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm3Regs.TBCTL.bit.PRDLD = TB_SHADOW;//无活动加载
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;//同步直通
//
//将影子寄存器加载设置为零
//
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
//设置比较值
//
EPwm3Regs.CMPA.bit.CMPA = Duty_SW[2];//设置比较 A 值
EPwm3Regs.CMPB.bit.CMPB = Duty_SW[2];//设置比较 B 值
//
//设置操作
//
EPwm3Regs.AQCTLA.bit.CAU = AQ_SET;//在递增计数期间设置事件 A 上的 PWM3A
EPwm3Regs.AQCTLA.bit.CAD = AQ_CLEAR;//在递减计数期间清除事件 A 上的 PWM3A
EPwm3Regs.AQCTLB.bit.CBU = AQ_CLEAR;//在递增计数期间清除事件 B 上的 PWM3B
EPwm3Regs.AQCTLB.bit.CBD = AQ_SET;//在递减计数期间在事件 B 上设置 PWM3B
//
//高电平有效互补 PWM -设置死区
//
EPwm3Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;//完全启用:同时启用 A 和 B
EPwm3Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补
EPwm3Regs.DBRED.bit.DBRED = N_three 相位死区;//上升沿高互补
EPwm3Regs.DBFED.bit.DBFED = N_three 相位死区;//下降沿高互补
}
//
// InitEPwm4 -初始化 EPWM4配置
//
空 InitEPwm4 (空)
{
//
//设置 TBCLK
//
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//向上计数
EPwm4Regs.TBPRD = N_H_BRIDGE_SW_PERIOD;//设置计时器周期
EPwm4Regs.TBCTL.bit.PHSEN = TB_DISABLE;//主模式
EPwm4Regs.TBPHS.bit.TBPHS = 0x0000;//相位为0
EPwm4Regs.TBCTR = 0x0000;//清除计数器
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm4Regs.TBCTL.bit.PRDLD = TB_SHADOW;//无活动加载
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;//同步下行数据流
//
//将影子寄存器加载设置为零
//
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
//设置比较值
//
EPwm4Regs.CMPA.bit.CMPA = N_H_BRIDGE_SW_PERIOD / 2;//设置比较 A 值
EPwm4Regs.CMPB.bit.CMPB = N_H_BRIDGE_SW_PERIOD / 2;//设置比较 B 值
//
//设置操作
//
EPwm4Regs.AQCTLA.bit.CAU = AQ_SET;//在递增计数期间设置事件 A 上的 Pwm4A
EPwm4Regs.AQCTLA.bit.CAD = AQ_CLEAR;//在递减计数期间清除事件 A 上的 Pwm4A
EPwm4Regs.AQCTLB.bit.CBU = AQ_CLEAR;//在递增计数期间清除事件 B 上的 Pwm4B
EPwm4Regs.AQCTLB.bit.CBD = AQ_SET;//在递减计数期间设置事件 B 上的 Pwm4B
//
//高电平有效互补 PWM -设置死区
//
EPwm4Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;//完全启用:同时启用 A 和 B
EPwm4Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补
EPwm4Regs.DBRED.bit.DBRED = N_H_BRIDGE_DEADBAND;//上升沿高电平互补
EPwm4Regs.DBFED.bit.DBFED = N_H_BRIDGE_D死 区;//下降沿高互补
}
//
// InitEPwm5 -初始化 EPWM5配置
//
空 InitEPwm5 (空)
{
//
//设置 TBCLK
//
EPwm5Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//向上计数
EPwm5Regs.TBPRD = N_H_BRIDGE_SW_PERIOD;//设置计时器周期
EPwm5Regs.TBCTL.bit.PHSEN = TB_ENABLE;//从机模式
EPwm5Regs.TBPHS.bit.TBPHS = N_H_BRIDGE_DUTY;//相移
EPwm5Regs.TBCTR = 0x0000;//清除计数器
EPwm5Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm5Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm5Regs.TBCTL.bit.PRDLD = TB_SHADOW;//无活动加载
EPwm5Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;//同步直通
//
//将影子寄存器加载设置为零
//
EPwm5Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm5Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm5Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
//
//设置比较值
//
EPwm5Regs.CMPA.bit.CMPA = N_H_BRIDGE_SW_PERIOD / 2;//设置比较 A 值
EPwm5Regs.CMPB.bit.CMPB = N_H_BRIDGE_SW_PERIOD / 2;//设置比较 B 值
//
//设置操作
//
EPwm5Regs.AQCTLA.bit.CAU = AQ_SET;//在递增计数期间设置事件 A 上的 Pwm5A
EPwm5Regs.AQCTLA.bit.CAD = AQ_CLEAR;//在递减计数期间清除事件 A 上的 Pwm5A
EPwm5Regs.AQCTLB.bit.CBU = AQ_CLEAR;//在递增计数期间清除事件 B 上的 Pwm5B
EPwm5Regs.AQCTLB.bit.CBD = AQ_SET;//在递减计数期间设置事件 B 上的 Pwm5B
//
//高电平有效互补 PWM -设置死区
//
EPwm5Regs.DBCTL.bit.OUT_MODE = DB_FUL_ENABLE;//完全启用:同时启用 A 和 B
EPwm5Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补
EPwm5Regs.DBRED.bit.DBRED = N_H_BRIDGE_DEADAND;//上升沿高电平互补
EPwm5Regs.DBFED.bit.DBFED = N_H_BRIDGE_D死 区;//下降沿高互补
}
//
// epwm1_ISR - EPWM1 ISR
//
_interrupt void epwm1_ISR (void)
{
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//电压矢量计算
CurrentController();
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//三相 PWM 计算
开关(PWM_Algorithm)
{
案例1:
SinePWM ();
中断;
案例2:
SinePWMTriangularInjection();
中断;
案例3:
SVPWM();
中断;
}
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//三相 PWM 寄存器更新
n_three 相位 SW_period = round (100e6 / f_sw_three 相位/ 4);
EPwm1Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm2Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm3Regs.TBPRD = N_th3_PHASE_SW_PERIOD;//设置计时器周期
EPwm1Regs.CMPA.bit.CMPA = ROUND (Duty_SW[0]* N_three PHASE_SW_PERIOD);//设置比较 EPWM1 A 值
EPwm2Regs.CMPA.bit.CMPA = ROUND (Duty_SW[1]* N_three PHASE_SW_PERIOD);//设置比较 EPWM2 A 值
EPwm3Regs.CMPA.bit.CMPA = ROUND (Duty_SW[2]* N_three PHASE_SW_PERIOD);//设置比较 EPWM3 A 值
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
// H 桥 PWM 寄存器更新
n_H_BRIDGE_SW_PERIOD = ROUND (100e6 / f_SW_H_BRIDGE / 2);
n_H_BRIDGE_Duty = round (Duty_H_BRIDGE * N_H_BRIDGE_SW_PERIOD);
EPwm4Regs.TBPRD = N_H_BRIDGE_SW_PERIOD;//设置计时器周期
EPwm5Regs.TBPRD = N_H_BRIDGE_SW_PERIOD;//设置计时器周期
EPwm4Regs.CMPA.bit.CMPA = ROUND (N_H_BRIDE_SW_PERIOD / 2);//设置比较 EPWM4 A 值
EPwm5Regs.CMPA.bit.CMPA = ROUND (N_H_BRIDE_SW_PERIOD / 2);//设置比较 EPWM5 A 值
EPwm5Regs.TBPHS.bit.TBPHS = N_H_BRIDGE_DUTY;//相移
//============================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//清除此计时器的 INT 标志
EPwm1Regs.ETCLR.bit.INT = 1;
//确认此中断以接收来自组3的更多中断
PieCtrlRegs.PIEACX.ALL = PIEACK_Group3;
}
void CurrentController (void)
{
U_ref_amp = u_dc / sqrt_3 * m_a;
n_th3_PHASE_UPDATE = EPwm1Regs.ETPS.bit.INTPRD;
U_ref_angle = u_ref_angle + two_pi*f_f_f_f_f_sw_three 相位* n_three 相位更新;
if (u_ref_angle > two_pi)
{
U_ref_angle = u_ref_angle - two_pi;
}
U_ref_alpha = u_ref_amp * cos (u_ref_angle);
u_ref_beta = u_ref_amp * sin (u_ref_angle);
}
void SinePWM (void)
{
Duty_sw[0]= u_ref_alpha;
Duty_sw[1]=- u_ref_alpha / 2 + sqrt_3 * u_ref_beta / 2;
Duty_sw[2]=- u_ref_alpha / 2 - sqrt_3 * u_ref_beta / 2;
Duty_sw[0]= Duty_sw[0]* sqrT_3 / u_dc / 2 + 0.5;
Duty_sw[1]= Duty_sw[1]* sqrT_3 / u_dc / 2 + 0.5;
Duty_sw[2]= Duty_sw[2]* sqrT_3 / u_dc / 2 + 0.5;
}
void SinePWMTriangularInjection (void)(void)
{
Duty_sw[0]= u_ref_alpha;
Duty_sw[1]=- u_ref_alpha / 2 + sqrt_3 * u_ref_beta / 2;
Duty_sw[2]=- u_ref_alpha / 2 - sqrt_3 * u_ref_beta / 2;
U_ref_abc_max = Duty_sw[0];
U_ref_abc_min = Duty_sw[0];
for (i=1;i<=2;i++)
{
if (u_ref_abc_max < duty_sw[i])
{
U_ref_abc_max = Duty_sw[i];
}
if (u_ref_abc_min > Duty_sw[i])
{
U_ref_abc_min = Duty_sw[i];
}
}
U_try_ref =(u_ref_abc_max + u_ref_abc_min)/ 2;
Duty_sw[0]=(Duty_sw[0]- u_try_ref)* sqrT_3 / u_dc / 2 + 0.5;
Duty_sw[1]=(Duty_sw[1]- u_try_ref)* sqrT_3 / u_dc / 2 + 0.5;
Duty_sw[2]=(Duty_sw[2]- u_try_ref)* sqrT_3 / u_dc / 2 + 0.5;
}
//
void SVPWM (void)
{
//注意:u_ref 是一个非振幅空间矢量。
//每个单位系统
//三相多级 SVPWM 输出电压
//从-(N_level-1)/2*u_dc 到(N_level-1)/2*u_dc,
//完全(N_level-1)*u_dc。
//因此,电压基准应为(N_level-1)*u_dc/sqrt (3)
U_ref_amp_SVPWM = sqrt (u_ref_alpha* u_ref_alpha + u_ref_beta* u_ref_beta);//幅度
U_ref_ang_SVPWM = atan2 (u_ref_beta、u_ref_alpha);//角度
//扇区检测与旋转或翻转到扇区1
switch ((int16) floor (u_ref_ang_SVPWM*3/PI))
{
//扇区1:[0,PI/3)
情况0:
Sector_SVPWM = 1;
中断;
//扇区2:[PI/3,PI*2/3):翻转
案例1:
Sector_SVPWM = 2;
U_ref_ang_SVPWM = two_pi_over_three - u_ref_ang_SVPWM;
中断;
//扇区3:[PI*2/3,PI ):旋转
案例2:
Sector_SVPWM = 3;
U_ref_ang_SVPWM -= two_pi_over_three;
中断;
//扇区4:[-PI、-PI*2/3)& PI:翻转
案例-3:
案例3:
Sector_SVPWM = 4;
U_ref_ang_SVPWM =- two_pi_over_three - u_ref_ang_SVPWM;
中断;
//扇区5:[-pi*2/3,pi/3)& pi:旋转
情况-2:
Sector_SVPWM = 5;
U_ref_ang_SVPWM += 2_pi_over_three;
中断;
//扇区6:[-pi/3,0):翻转
情况-1:
Sector_SVPWM = 6;
U_ref_ang_SVPWM =- u_ref_ang_SVPWM;
}
//电压基准过高:将过调制转换为线性调制
if (u_ref_amp_SVPWM * sqrt_3 / u_dc > 1)
U_ref_amp_SVPWM = sqrt_3 / 2;
其他
U_ref_amp_SVPWM = 3 * u_ref_amp_SVPWM / 2 / u_dc;
// 60度坐标系
U_ref_alpha_SVPWM = u_ref_amp_SVPWM * cos (u_ref_ang_SVPWM);
U_ref_beta_SVPWM = u_ref_amp_SVPWM * sin (u_ref_ang_SVPWM);
//
Duty_SVPWM[1]= u_ref_alpha_SVPWM - u_ref_beta_SVPWM / sqrt_3;
Duty_SVPWM[2]= u_ref_beta_SVPWM * 2 / sqrt_3;
Duty_SVPWM[0]=(1 - Duty_SVPWM[1]- Duty_SVPWM[2])/2;
// Vector_A * Duty_cycle_Vector_A + Vector_B * Duty_cycle_Vector_B + Vector_1_1 * Duty_cycle_Vector_1_1_1
Duty_SW[0]= V_SVPWM_BASIC [扇区_SVPWM][0][0]* Duty_SVPWM[1]+ V_SVPWM_BASIC [扇区_SVPWM][1][0]* Duty_SVPWM[2]+ Duty_SVPWM[0];
Duty_SW[1]= V_SVPWM_BASIC [扇区_SVPWM][0][1]* Duty_SVPWM[1]+ V_SVPWM_BASIC [扇区_SVPWM][1]* Duty_SVPWM[2]+ Duty_SVPWM[0];
Duty_SW[2]= V_SVPWM_BASIC [扇区_SVPWM][0][2]* Duty_SVPWM[1]+ V_SVPWM_BASIC [扇区_SVPWM][1][2]* Duty_SVPWM[2]+ Duty_SVPWM[0];
}
//
//文件结束
//