Other Parts Discussed in Thread: DRV8412
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28035 主题中讨论的其他器件:DRV8412
工具/软件:Code Composer Studio
你好
我使用 TMS320F28035 微控制器和 DRV8412DDW 评估板对步进电机进行场定向控制。
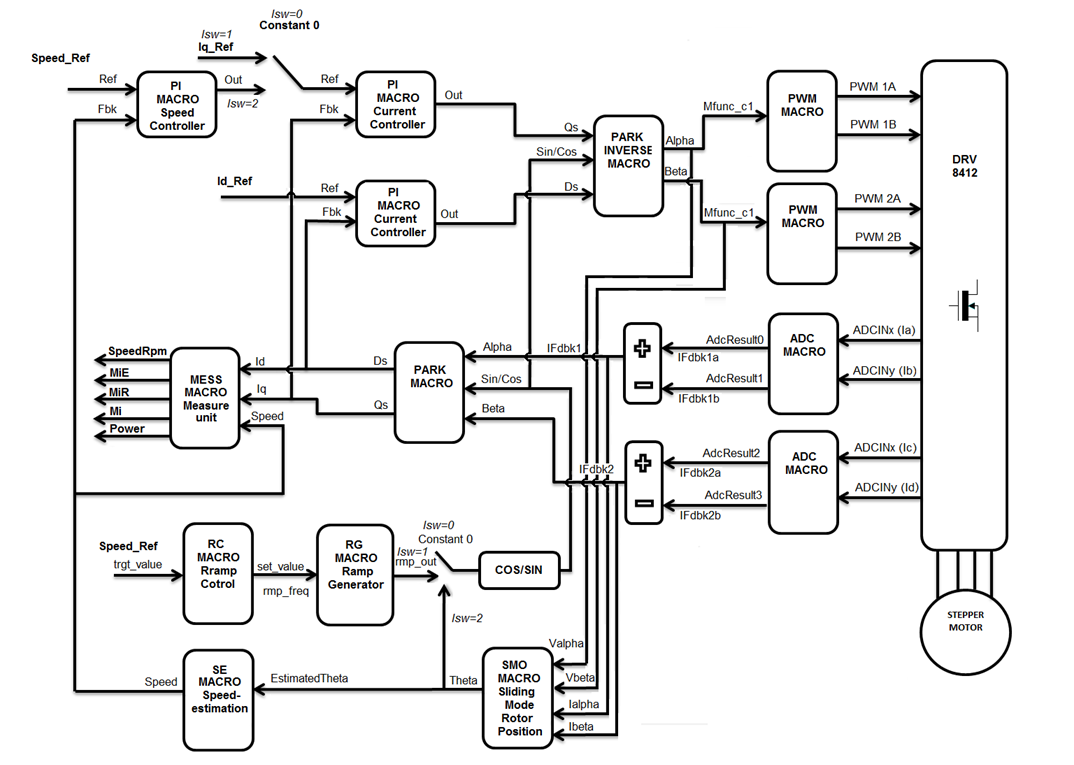
在 DQ 系统中控制电机
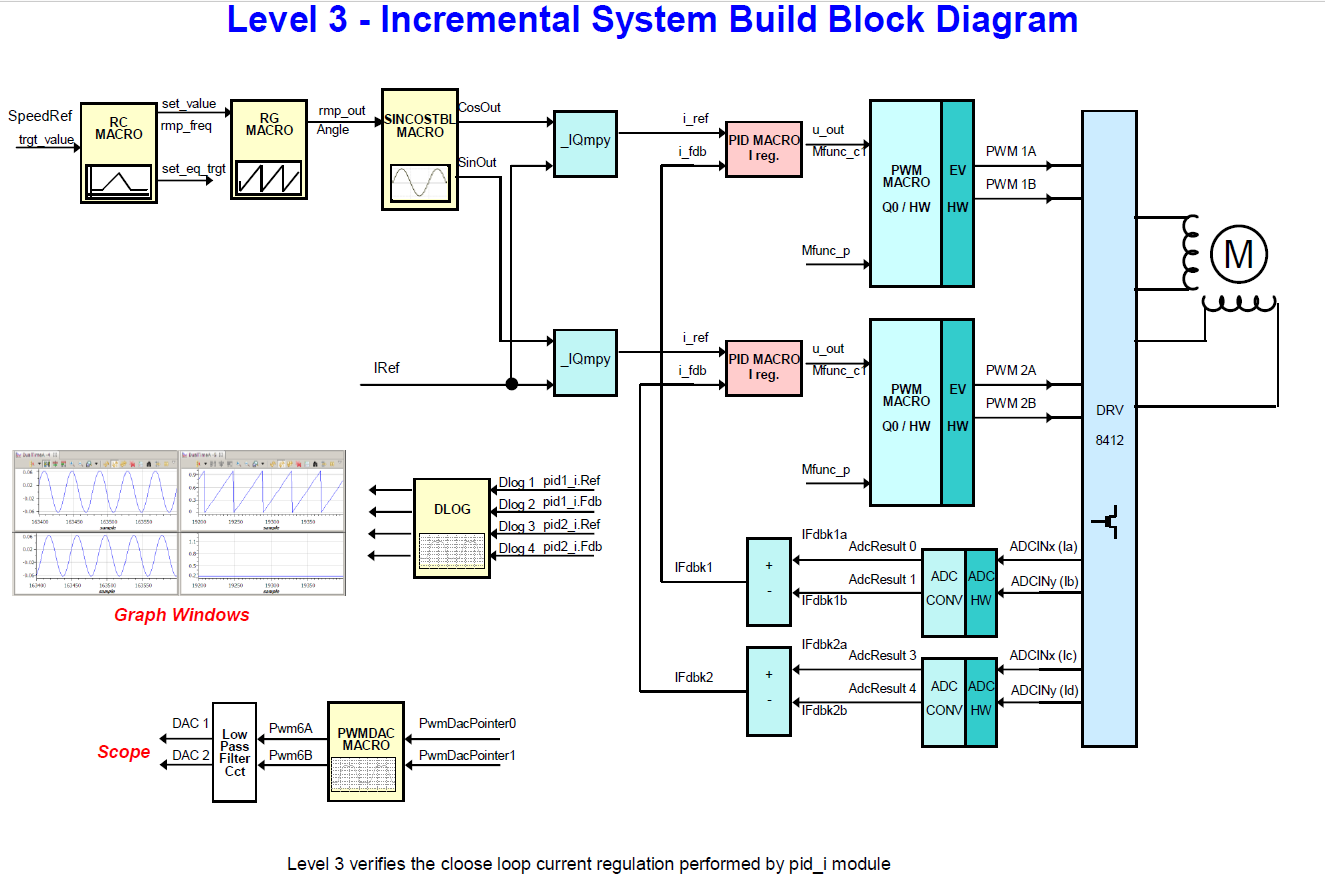
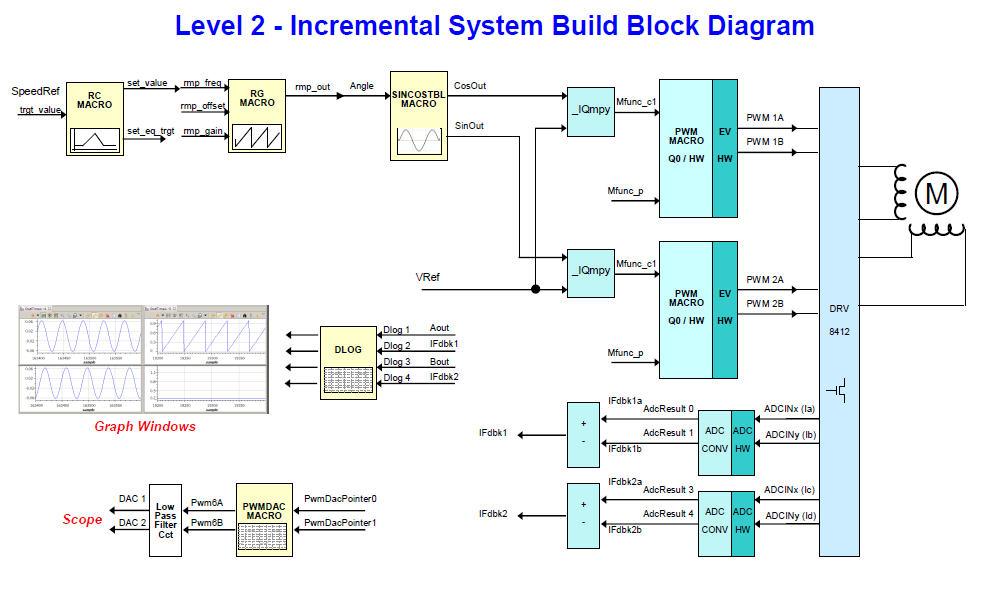
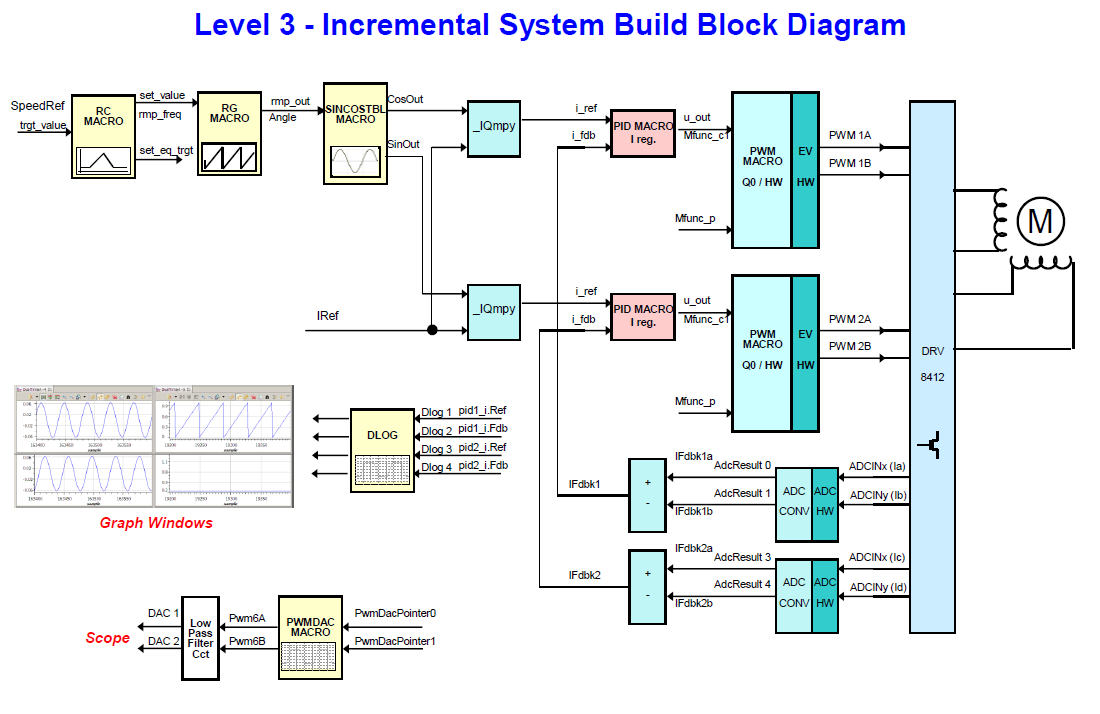
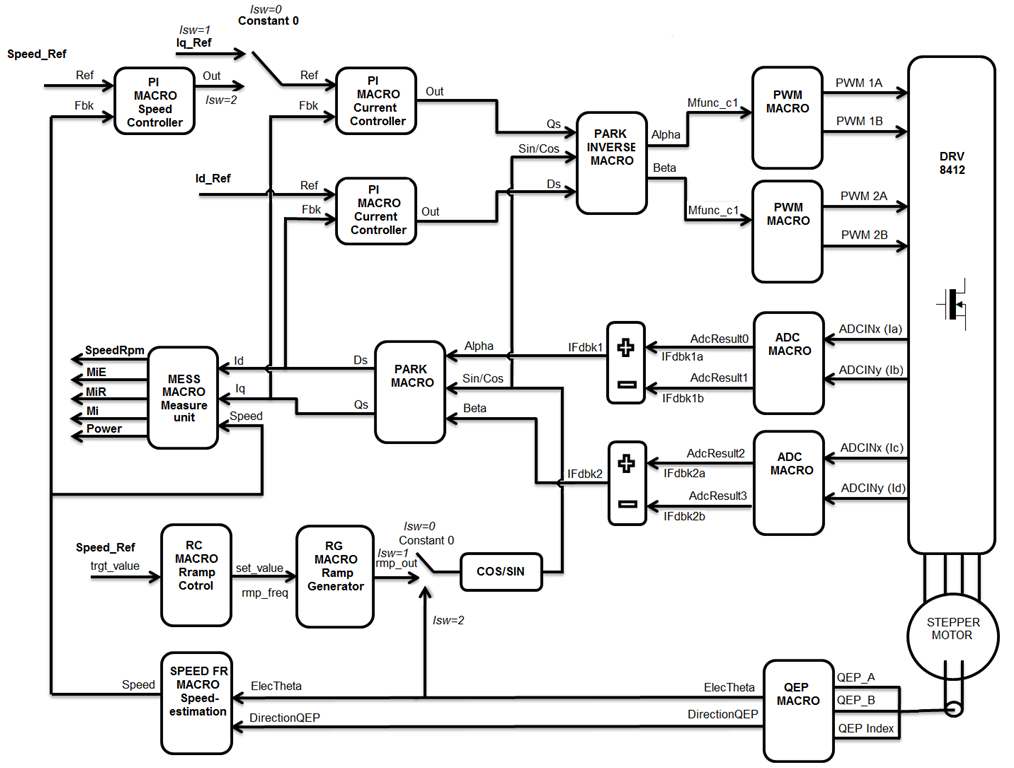
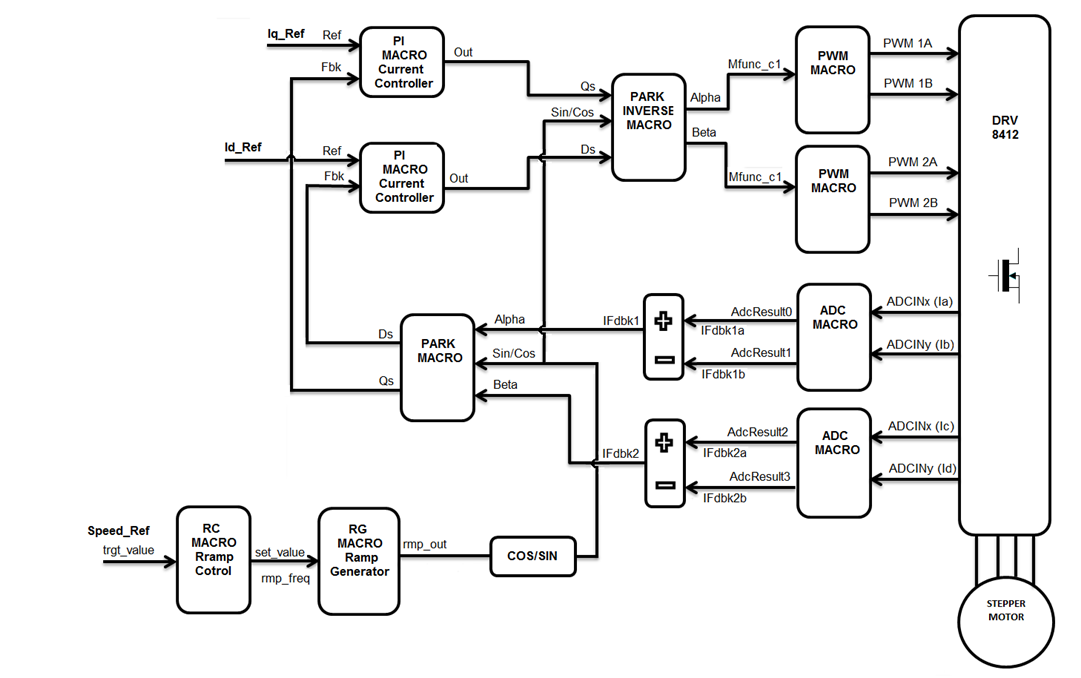
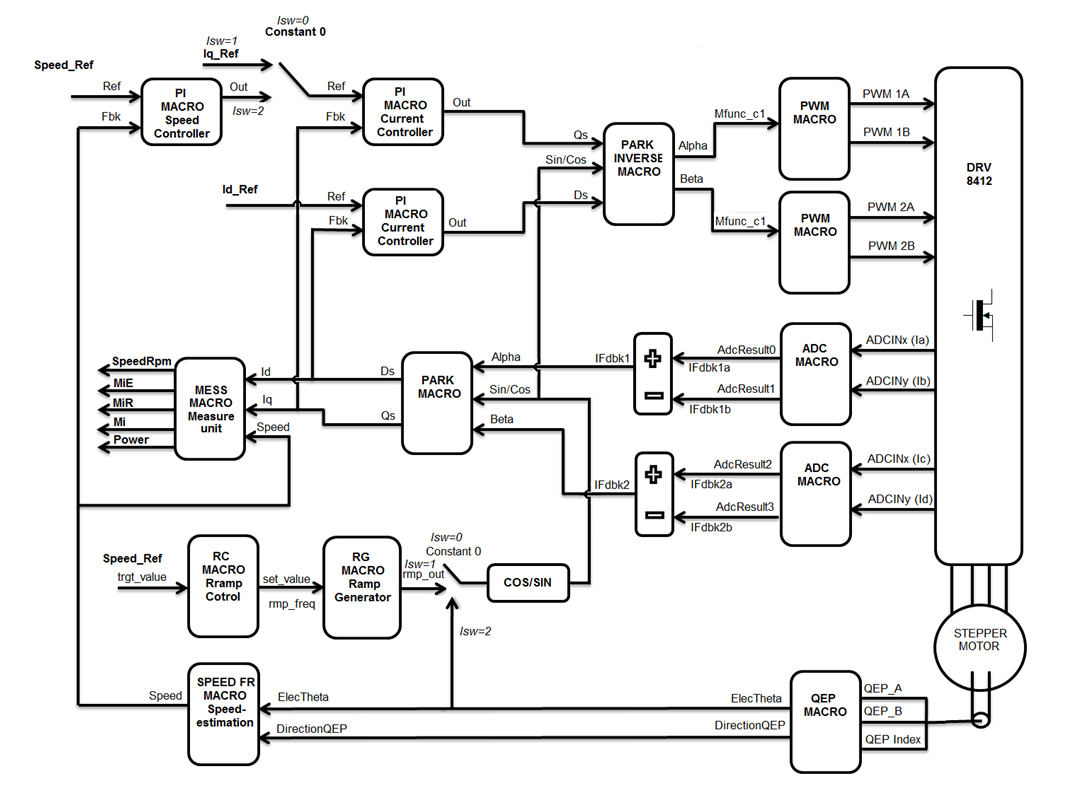
我的宏块结构如下所示:
在本例中、我使用编码器、因此我可以使用电流控制器的级联速度控制。
问题如下:
在第一种情况下、电流控制无法达到高于500rpm 的速度。 在10kHz 时、电机运行速度较慢、因此我必须将 PWM 逆变器的频率设置为10kHz 至30kHz。
在 TI 的示例中、有一个具有电流控制功能的步进电机控制的主要示例。 如果您将电流设置为3A、则可以达到1800rpm。 电流为3A 时、DRV8412驱动器变得非常热。 DRV8412是否不会损坏?
在与电流控制器级联速度控制的第二种情况下、电机的最大运行转速为1100rpm。
我的任务是控制 DQ 系统中的发动机、我如何在 DQ 系统中实现如此高的速度、如所示。
我尝试了所有操作、例如、逆变器频率仍在增加、电流振幅增加、电机运行速度不会更快。
如何实现与级联控制相同的1100rpm 电流控制速度?
感谢你的帮助
TI 示例: