

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 主题中讨论的其他器件:DRV8303、 DRV8301、 OPA376
下午好!
我将回顾现有的电路板设计、以进一步提高电流效率。 我能够完成所有实验、包括使用 instaSPIN 的 lab12、并达到电机的最大速度~24kRPM。 但是、它的运行电流大约是预期电流的两倍、因此我知道它没有高效运行。
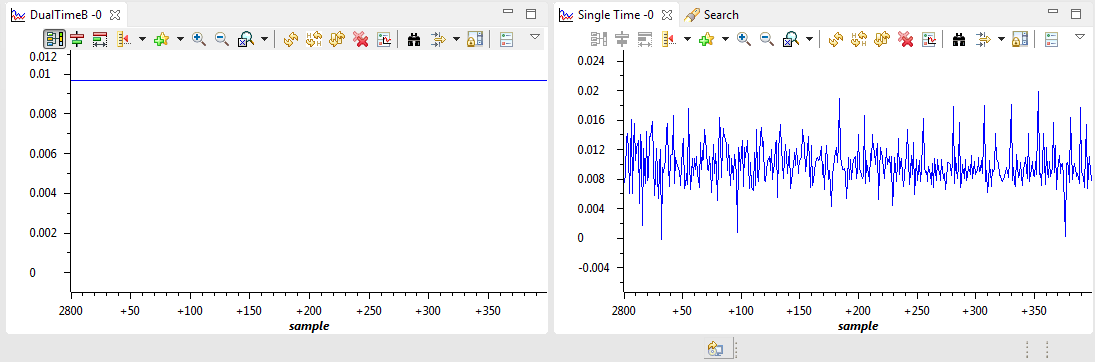
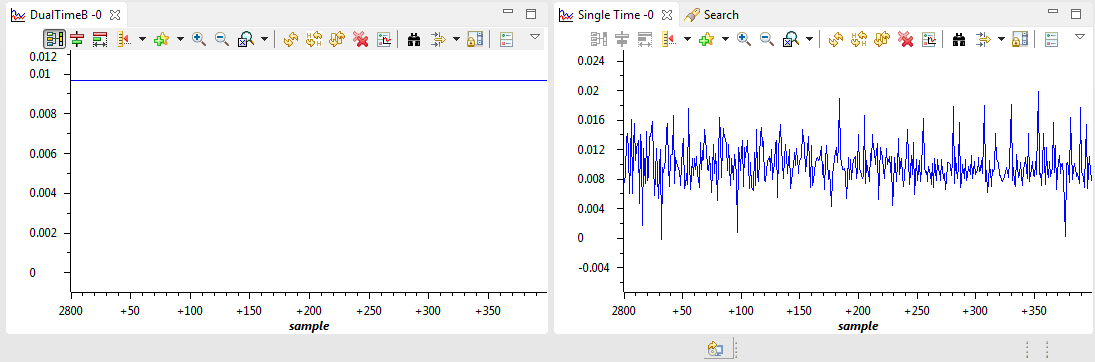
我再次查看了 lab01c、发现电流跟踪性能非常糟糕。 当 Iq_Ref 恒定为~0.1时、测得的 Iq 信号看起来像噪声。 基准 Iq 有轻微偏置、但振荡过多。 有趣的是、电机确实会旋转、但看起来与实验教程的预期输出完全不同。 看到这一点后、我返回 lab01b、发现电流波形的形状不是很好。 也许我没有在正确的位置对当前通道进行采样?
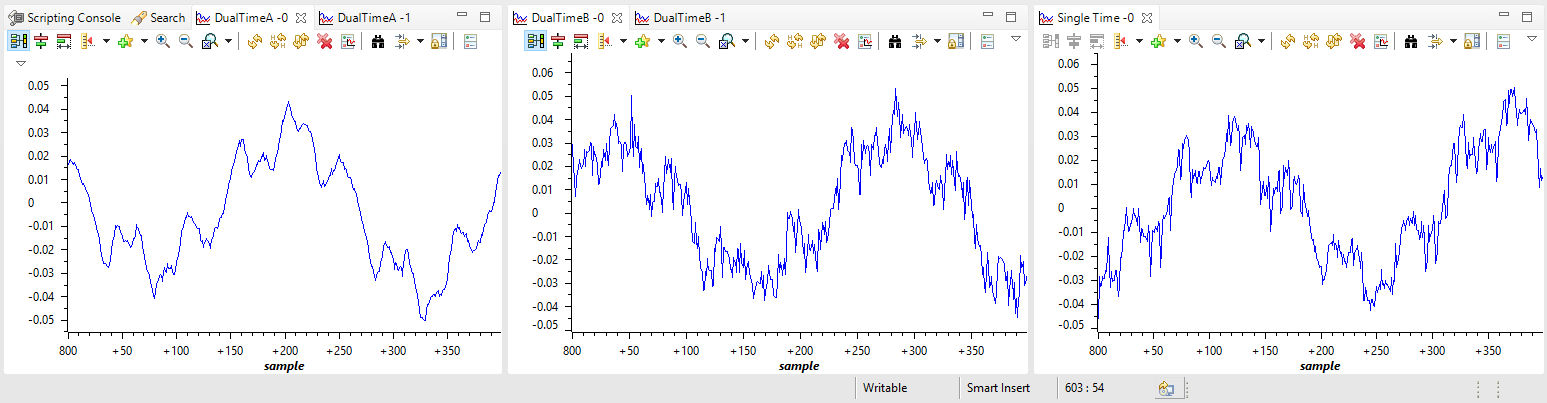
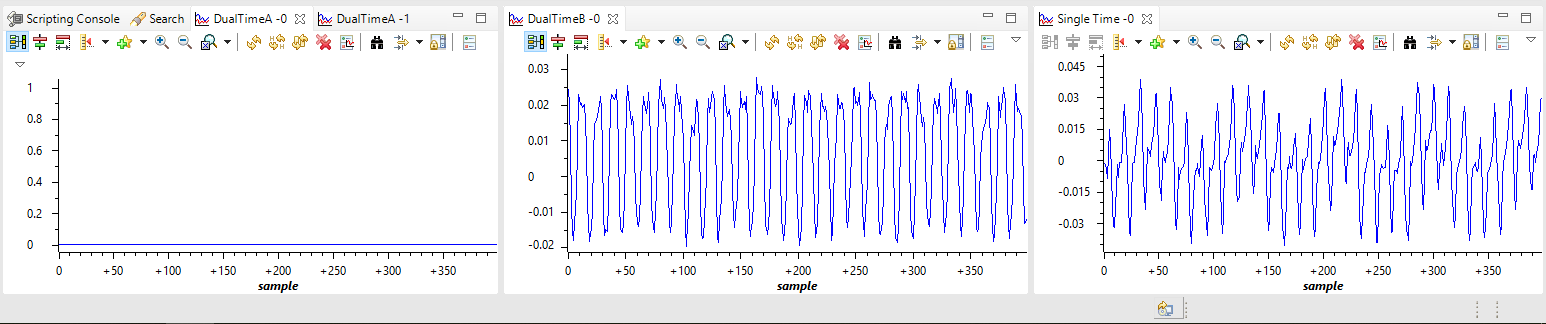
以下是数据记录器在不同速度下的三个电压和两个不同电流波形示例的快照。 您可以看到、波形看起来与示例中的纯正弦信号完全不同。 我确实必须修改 hal.c 和 hal.h 才能添加4个额外的 ADC 输入(一个编码器有2个模拟输入、用户输入有2个模拟输入)。 添加这些额外输入是否会导致问题?
电压

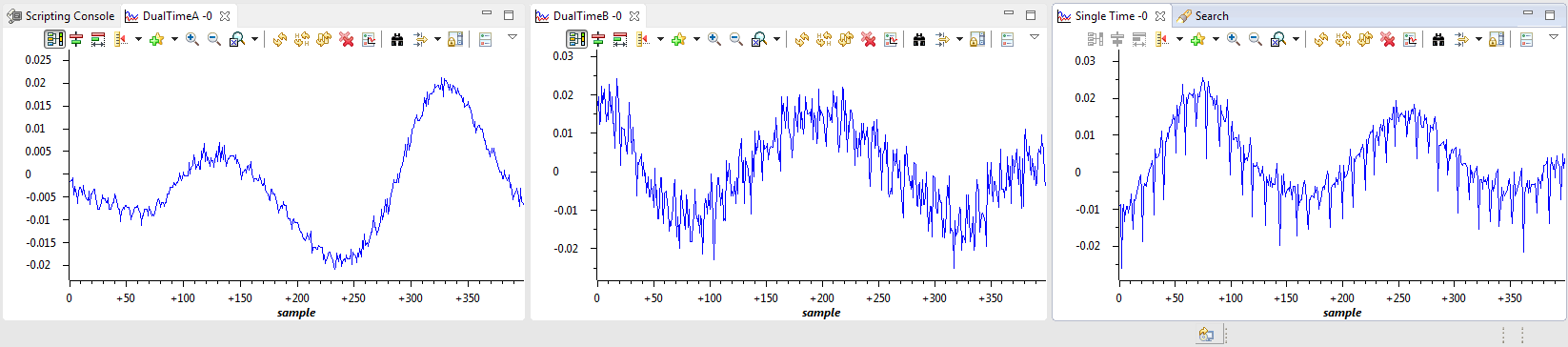
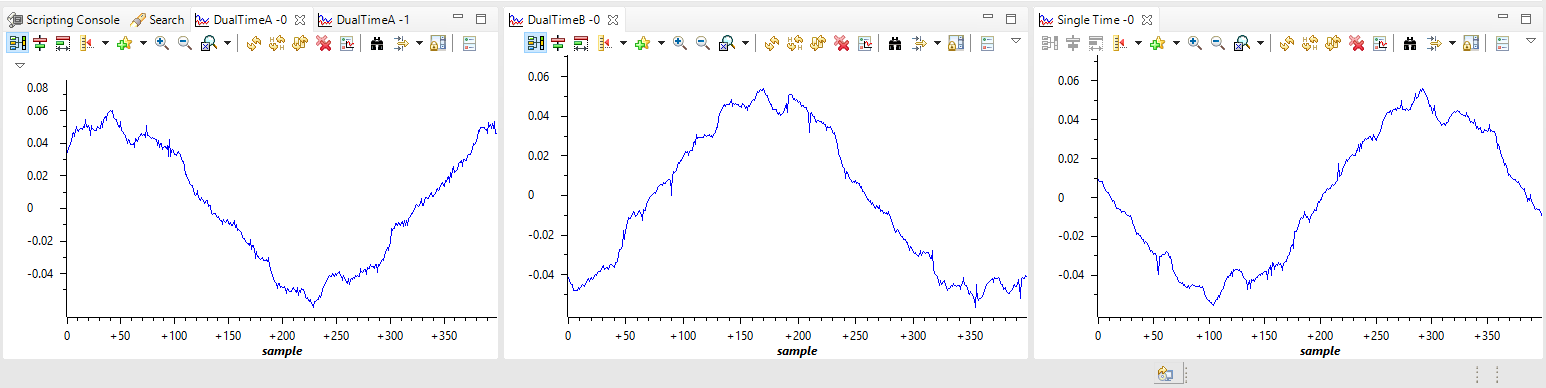
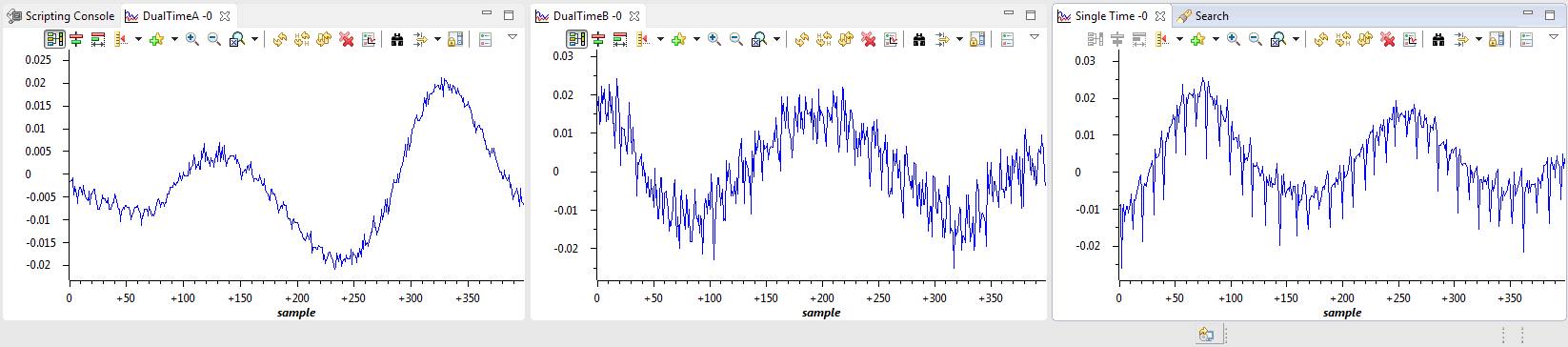
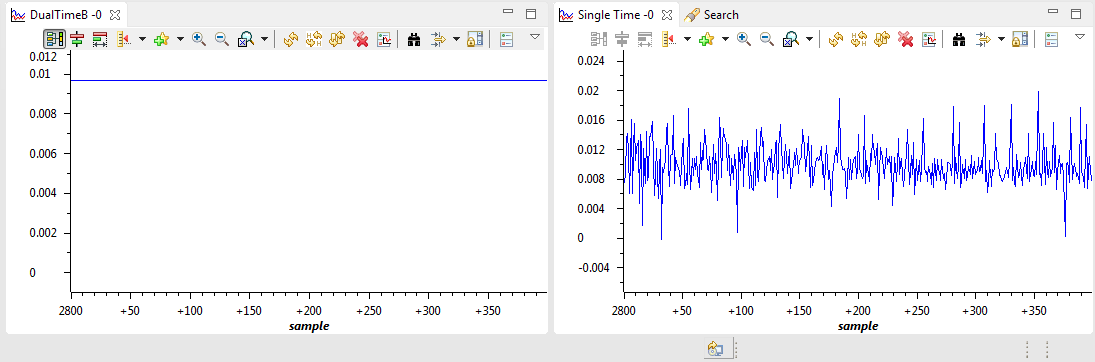
开环控制期间 A 相、B 相和 C 相电流的第一个和第二个示例(不同速度)(lab01b)

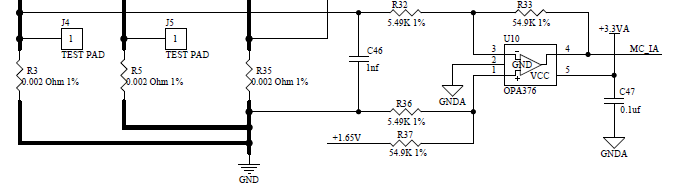
我的 DRV8303配置是否存在问题?
如果您认为可能存在硬件问题、请提供您对问题进行故障排除的建议。
感谢您的支持!
此致、
Chris











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}