请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069M 您好、香榭丽舍
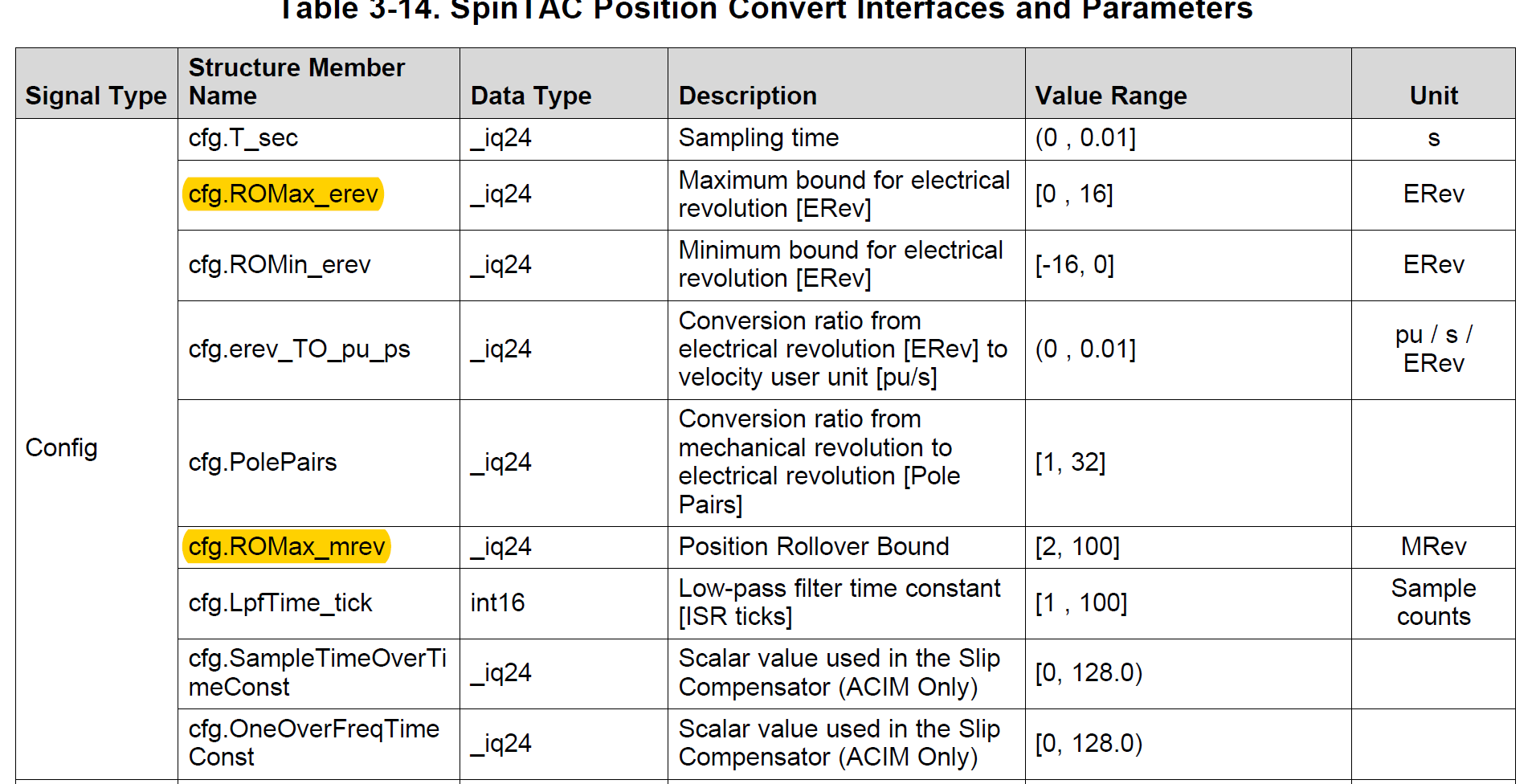
我的客户询问了 STPOSCTL_setPositionReference_mrev (ST_POSCTL_Handle handle、_IQ24 posRef)的使用情况。 我检查了它的定义、发现 posRef 范围在[-ROMax、ROMax]之间。 我尝试找到 ROMax 定义、但找不到它。 我已检查 TRM 和表3-14显示 cfg 结构。 但是、它没有显示 ROMax 变量。 我还搜索整个 motoware、但我没有找到任何 ROMax 定义。 我想 ROMax 值与 cfg.ROMax_erev 相同。 但我不确定。 是否有人可以帮助我检查 ROMax 值的定义位置? 谢谢