Other Parts Discussed in Thread: MOTORWARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8312-C2-KIT 主题中讨论的其他器件:MOTORWARE
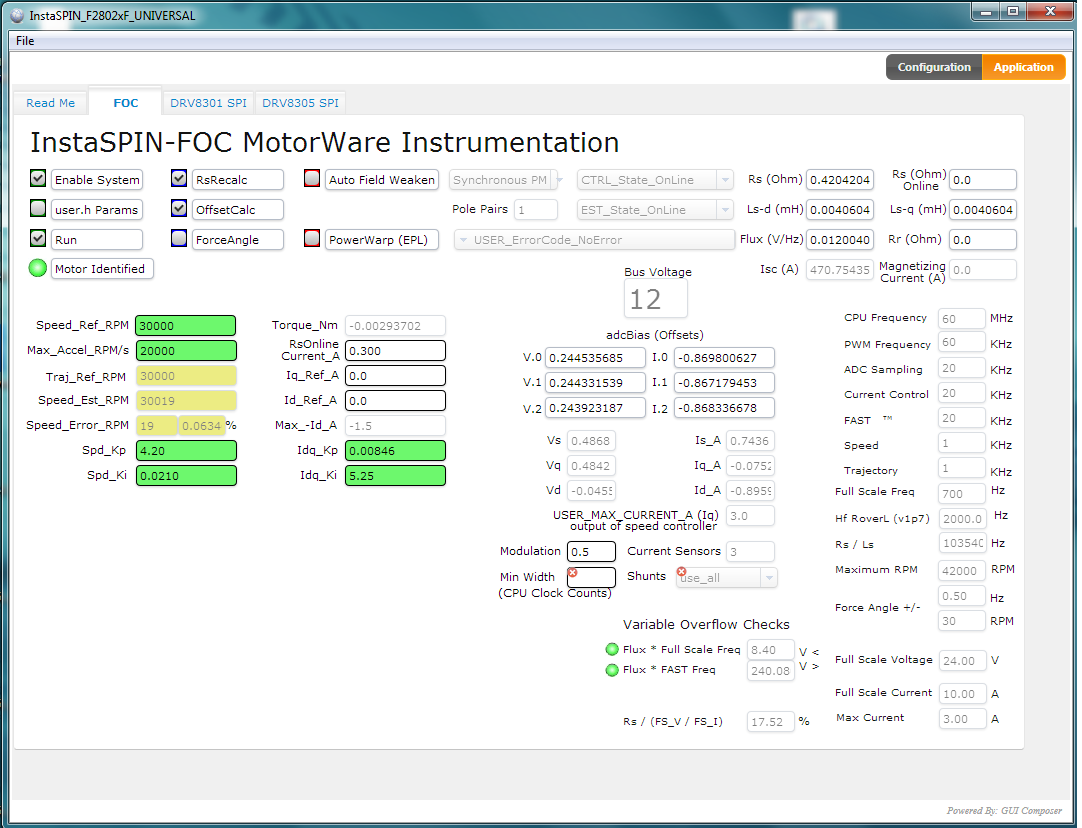
使用时、我能够以35K rpm 的转速运行电机、但电机温度在10-15分钟内达到50摄氏度。(使用实验10a)
我们有另一个 BLDC 电机控制器、使其以相同的速度运行、温度不会超过42度。
什么可能出错? 我的代码中是否缺少任何内容或配置不正确?

 '
'