请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDM-Delfino-EtherCAT 主题中讨论的其他器件:LAUNCHXL-F28379D、 controlSUITE、 TMDSECATCNCD379D、 TMDSICE3359
您好!
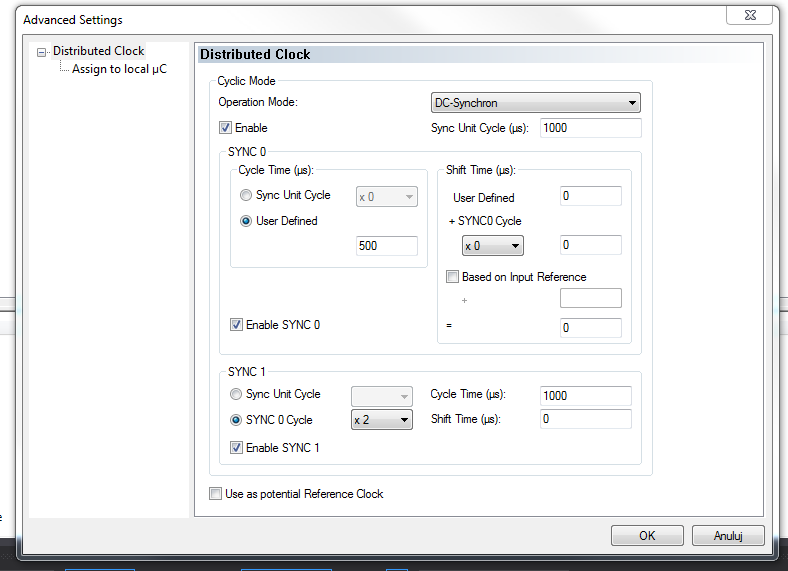
我成功运行了连接到 LaunchXL-F28379D 的 TIDM-Delfino-EtherCAT。 我可以访问 ETG、以便准备堆栈文件、分配供应商 ID 并连接到 TwinCAT 3。 它在自由运行周期中运行。 这是我的问题-自由运行周期可在4ms 周期内工作。 我必须将这个时间减少到大约100us。 我认为这里有必要使用分布式时钟(DC)、但我不知道如何正确设置它。 TwinCAT 中与直流模式相关的每一次更改都会中断传输。
我的问题-如何打开分布式时钟? 在我的 SSC 文件中、DC_SUPPORTED 和 AL_EVENT_ENABLED 设置为1、因此可以使用直流模式 I PEVENT。
BR、
Dawid。