请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28069M 您好!
我已成功地在实验12A-13a 中运行 PMSM。 速度控制在较低的速度下也能很好地工作。
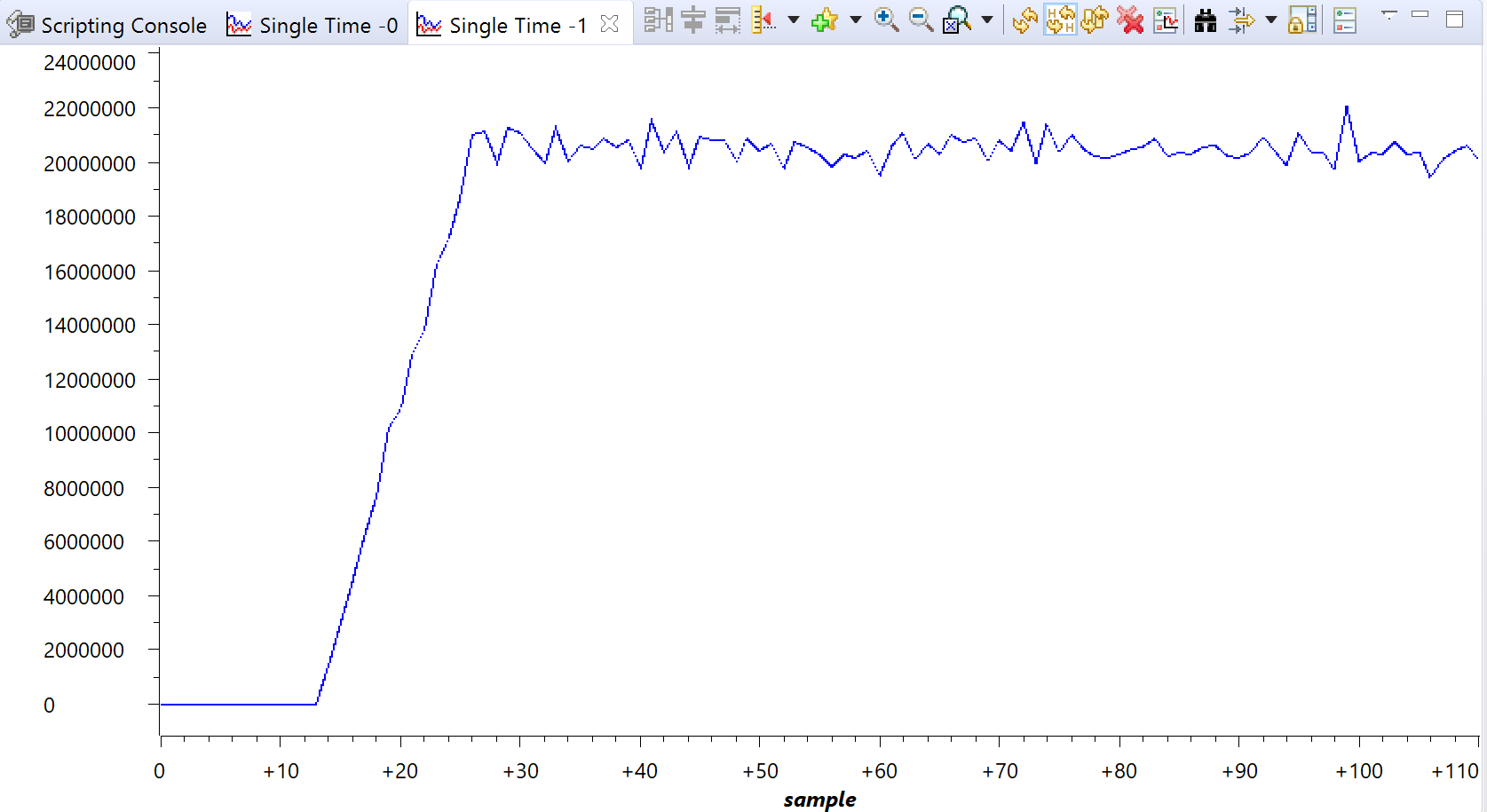
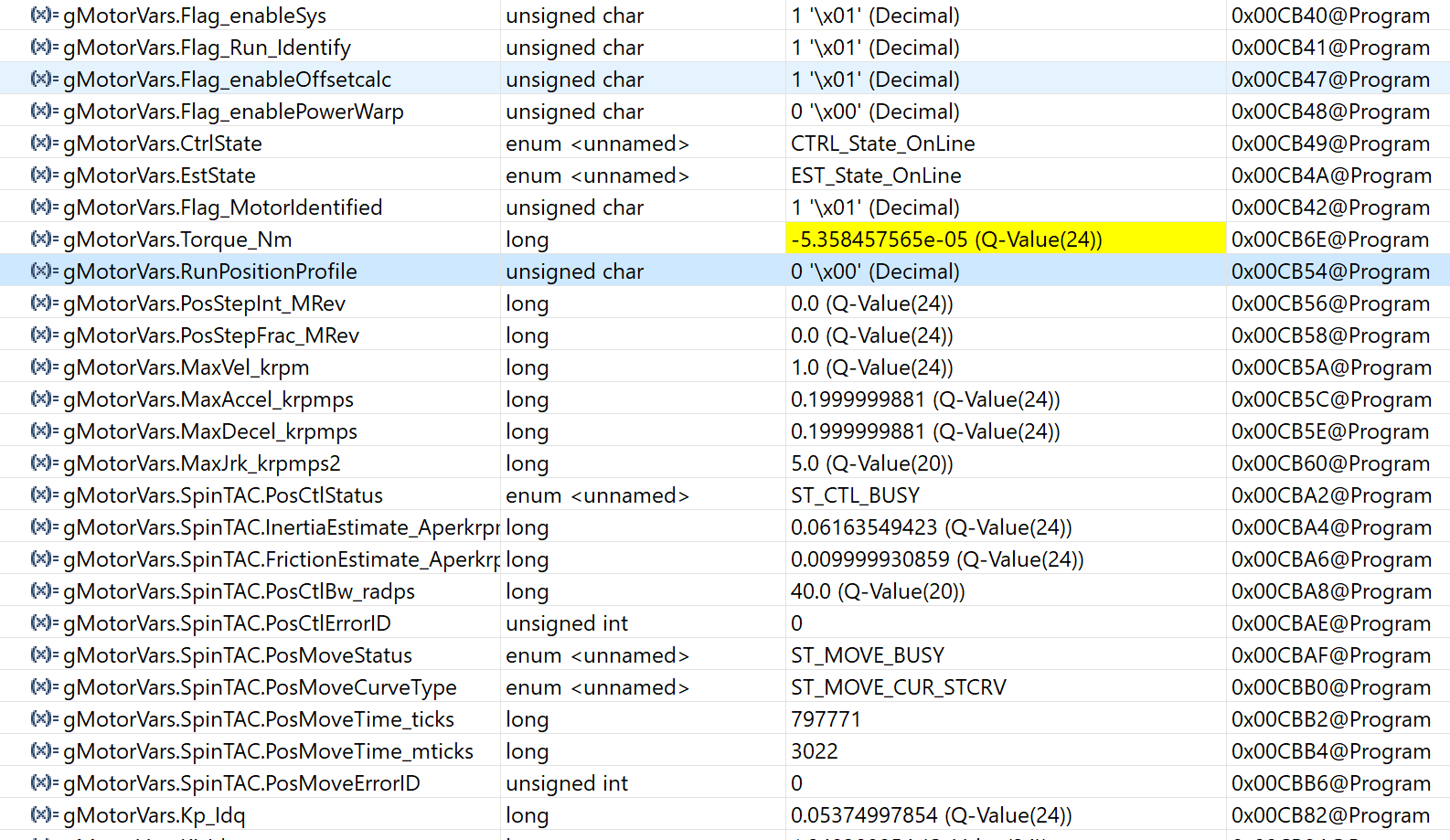
在实验13B 中、我遇到了 wierd 问题。 当我打开位置阶跃时、电机开始运行并加速至设定的最大速度、并且在不禁用系统的情况下不会停止。 这不取决于 gMotorVars.PosStepInt_MRev 变量和 gMotorVars.PosStepFrac_MRev 变量,系统不会在 gMotorVars.SpinTAC.ErrorID 或 gMotorVars.SpinTAC.PosMoveErrorID 中提供任何错误代码 。 User.h 和硬件设置与之前的实验相同。 最初认为增加环路抽取会有所帮助、但遗憾的是、它没有影响。
是否有任何可能出错的想法?
[编辑后的13a -> 13b]