Other Parts Discussed in Thread: CONTROLSUITE, TMDSADAP180TO100, C2000WARE-MOTORCONTROL-SDK, C2000WARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28065 主题中讨论的其他器件:controlSUITE、 C2000WARE-MOTORCONTROL-SDK、 C2000WARE
尊敬的 TI 专家:
我想使用 C2000微控制器驱动 PMSM 电机。
我使用 FOC 算法来控制电机。
我设计了一个定制板。 我开始阅读此应用手册:
C:\ti\controlSUITE\development_kits\DRV8312-C2-Kit_v128\PM_Sensorless
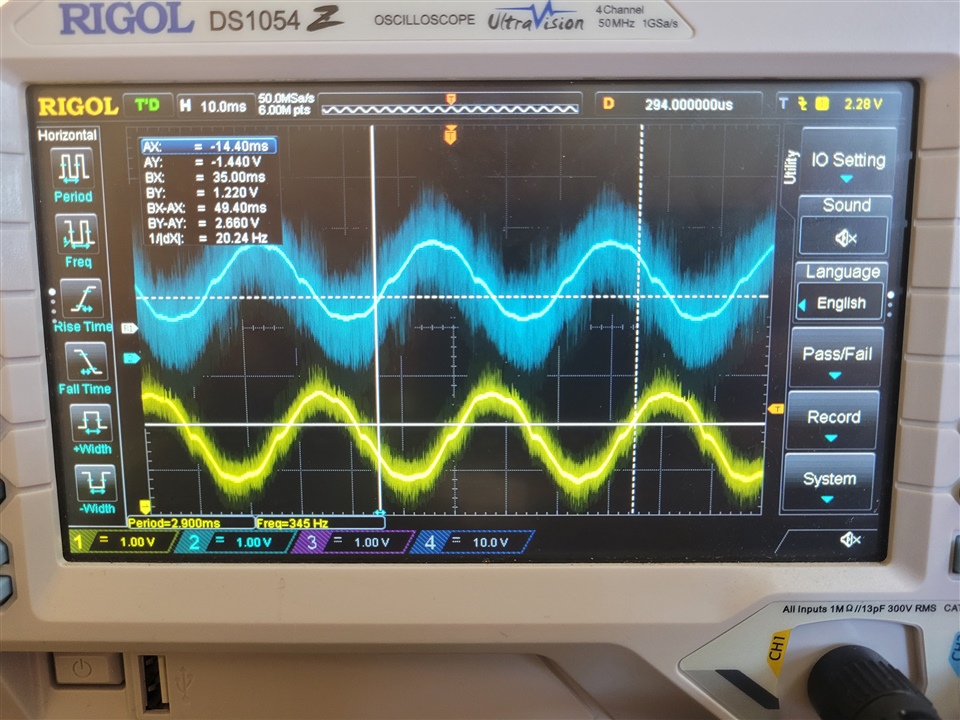
在调整 pid 控制器参数后的生成级别4中,A 相和 B 相的电流波形应显示为下图:

但是、当我检查波形时、它们不是完全正弦波。 这是 A 相和 B 相的电流波形
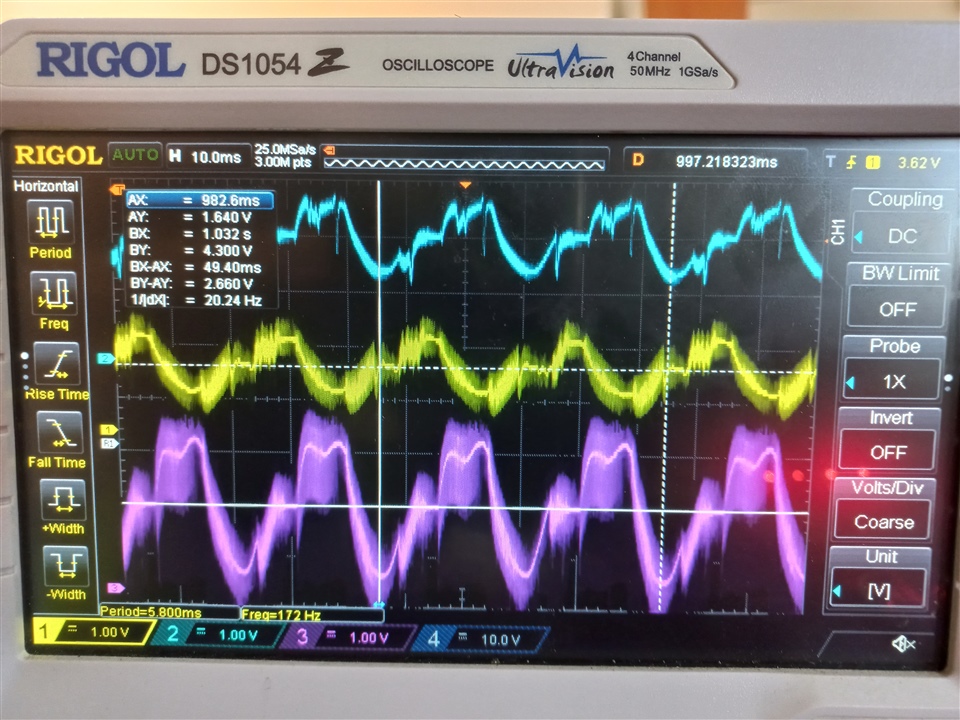
蓝色波形是 A 相(使用 PWMDAC)的电流波形、黄色波形是 B 相(使用 PWMDAC)的电流波形、紫色波形也是 A 相的电流波形(在电流传感器的输出上使用示波器探针)。
我是否可以将这些波 形视为正弦波形? 恐怕我没有正确调整 PID 控制器的参数(IQ、ID)。
提前感谢您。