请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28335 主题中讨论的其他器件:C2000WARE
尊敬的社区成员:
我不熟悉 PID 控制器仿真。 我检查了数字控制库(DCL)。 我想对简单的 PID 块进行仿真。 构建文件时出现一些错误。 请提供建议。
我遵循的步骤如下所示:
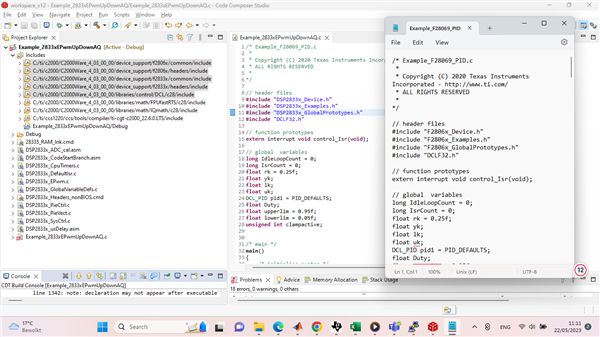
首先、我选择 "示例_F28069_pid.c" 来自 DCL 库(C:\ti\c2000\C2000Ware_4_03_00_00\libraries\control\DCL\c28\examples\F28069_PID)。
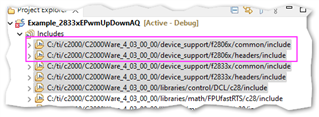
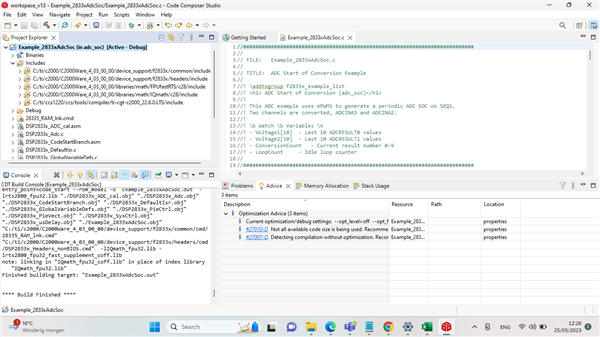
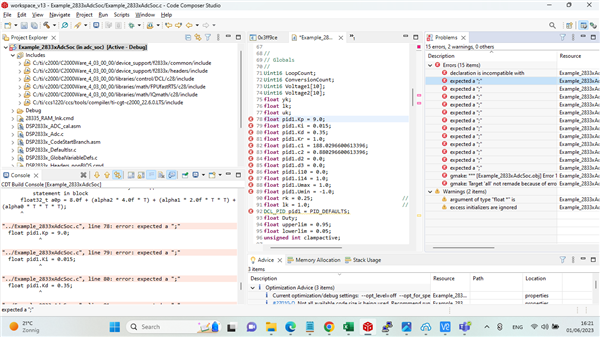
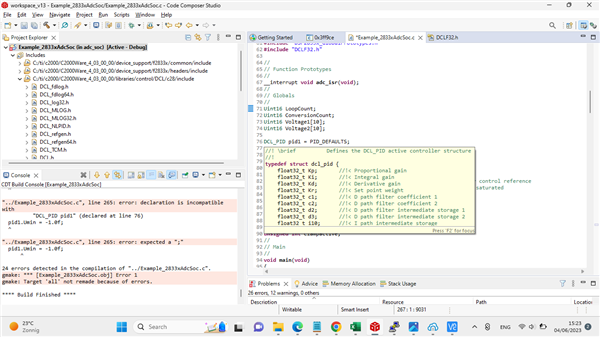
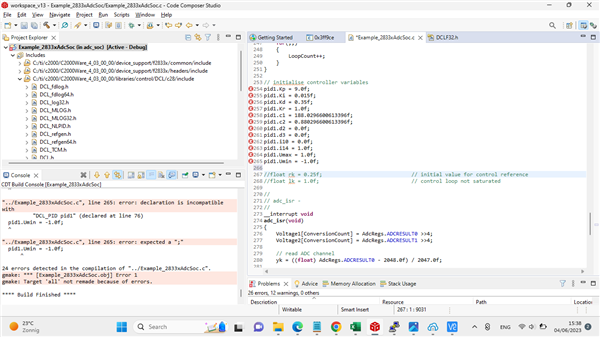
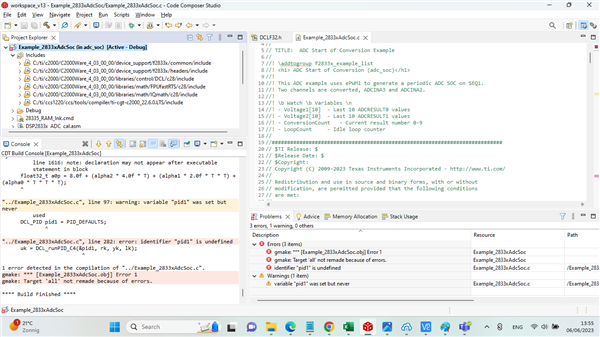
2-然后我上传了 CCS 程序并将头文件从 F2806x 更改为 DSPf2833x (第9-11行)、因为我使用的是 F28335器件(带有评估板的控制卡)。 您还可以在"Project Explorer"部分中看到包含的文件。 请参见下图。
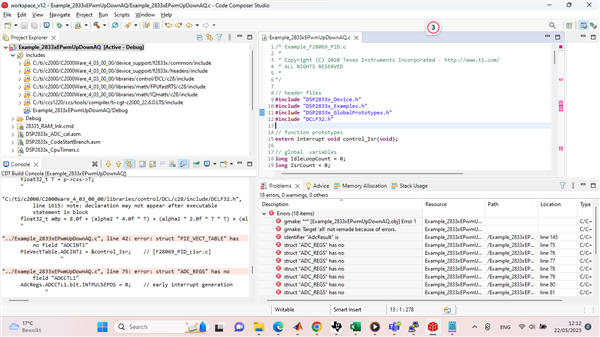
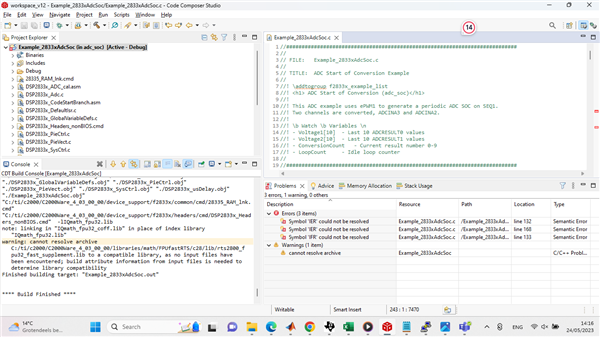
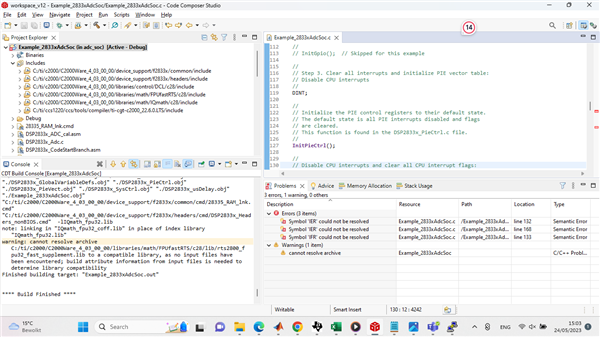
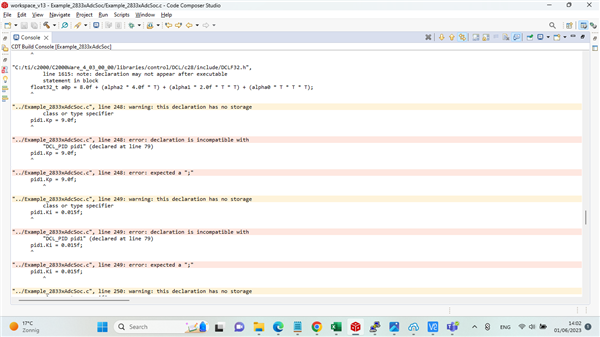
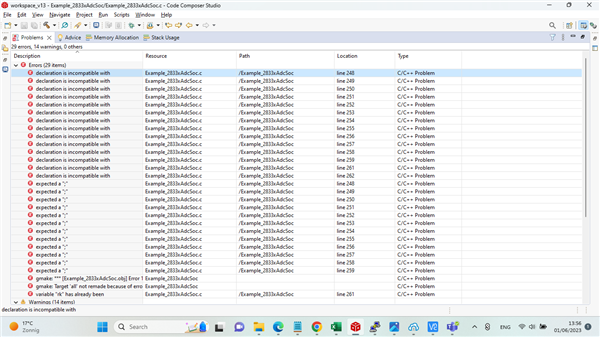
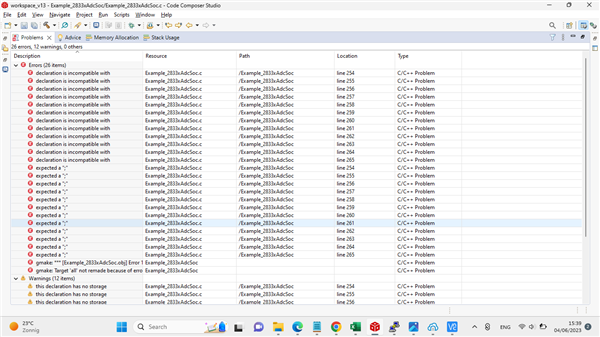
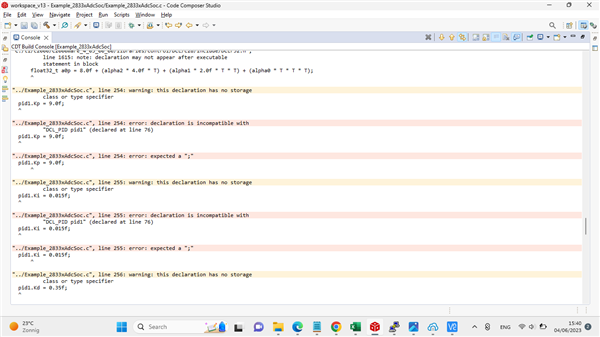
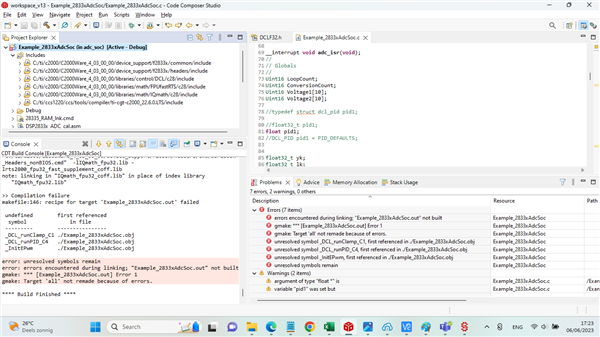
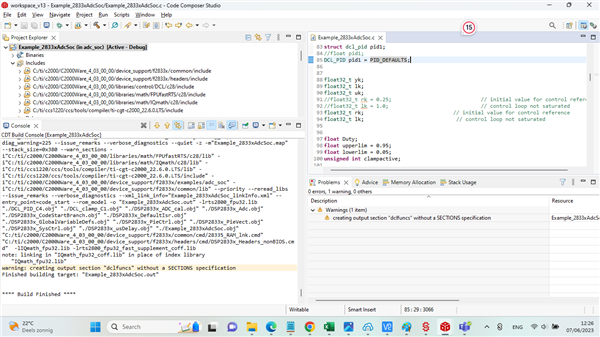
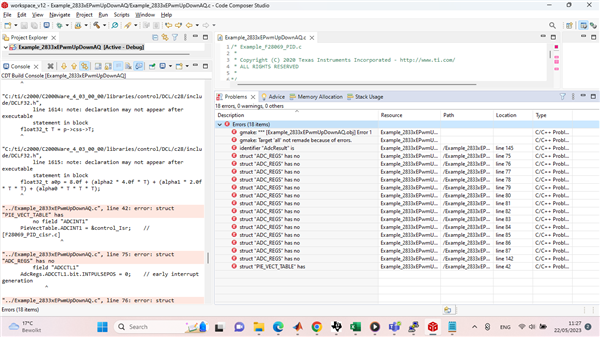
3-在编译工程时、控制台窗口中出现18个错误。 请参阅随附的 错误文件和问题窗口图片:
e2e.ti.com/.../console_5F00_err.txt
4-代码附在此处:
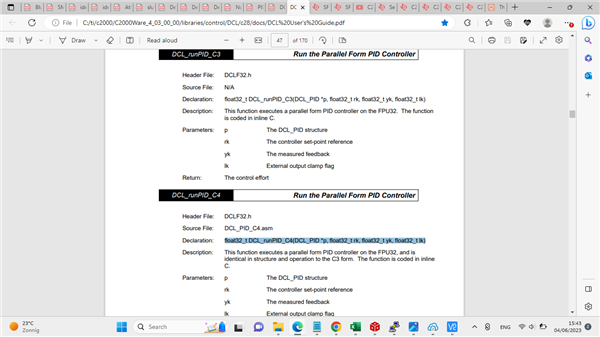
/* Example_F28069_PID.c * * Copyright (C) 2020 Texas Instruments Incorporated - http://www.ti.com/ * ALL RIGHTS RESERVED * */ // header files #include "DSP2833x_Device.h" #include "DSP2833x_Examples.h" #include "DSP2833x_GlobalPrototypes.h" #include "DCLF32.h" // function prototypes extern interrupt void control_Isr(void); // global variables long IdleLoopCount = 0; long IsrCount = 0; float rk = 0.25f; float yk; float lk; float uk; DCL_PID pid1 = PID_DEFAULTS; float Duty; float upperlim = 0.95f; float lowerlim = 0.05f; unsigned int clampactive; /* main */ main() { /* initialise system */ InitSysCtrl(); // [F2806x_SysCtrl.c] DINT; // disable interrupts IER = 0x0000; IFR = 0x0000; InitPieCtrl(); // initialise PIE control registers [F2806x_PieCtrl.c] InitPieVectTable(); // initialise PIE vector table [F2806x_PieVect.c] EALLOW; PieVectTable.ADCINT1 = &control_Isr; // [F28069_PID_cisr.c] EDIS; /* configure ePWM1 */ EALLOW; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; EDIS; InitEPwm(); // [F2806x_EPwm.c] EPwm1Regs.TBCTL.bit.CTRMODE = 3; // freeze TB counter EPwm1Regs.TBCTL.bit.PRDLD = 1; // immediate load EPwm1Regs.TBCTL.bit.PHSEN = 0; // disable phase loading EPwm1Regs.TBCTL.bit.SYNCOSEL = 3; // disable SYNCOUT signal EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0; // TBCLK = SYSCLKOUT EPwm1Regs.TBCTL.bit.CLKDIV = 0; // clock divider = /1 EPwm1Regs.TBCTL.bit.FREE_SOFT = 2; // free run on emulation suspend EPwm1Regs.TBPRD = 0x2328; // set period for ePWM1 (0x2328 = 10kHz) EPwm1Regs.TBPHS.all = 0; // time-base Phase Register EPwm1Regs.TBCTR = 0; // time-base Counter Register EPwm1Regs.ETSEL.bit.SOCAEN = 1; // enable SOC on A group EPwm1Regs.ETSEL.bit.SOCASEL = 1; // select SOC from zero match EPwm1Regs.ETPS.bit.SOCAPRD = 1; // generate pulse on 1st event EPwm1Regs.CMPCTL.bit.SHDWAMODE = 0; // enable shadow mode EPwm1Regs.CMPCTL.bit.LOADAMODE = 2; // reload on CTR=zero EPwm1Regs.CMPA.half.CMPA = 0x0080; // set compare A value EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // HIGH on CMPA up match EPwm1Regs.AQCTLA.bit.ZRO = AQ_CLEAR; // LOW on zero match EALLOW; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; EDIS; /* configure ADC */ InitAdc(); // [F2806x_Adc.c] EALLOW; AdcRegs.ADCCTL1.bit.INTPULSEPOS = 0; // early interrupt generation AdcRegs.INTSEL1N2.bit.INT1E = 1; // enabled ADCINT1 AdcRegs.INTSEL1N2.bit.INT1CONT = 0; // disable ADCINT1 continuous mode AdcRegs.INTSEL1N2.bit.INT1SEL = 1; // setup EOC1 to trigger ADCINT1 AdcRegs.INTSEL1N2.bit.INT2E = 0; // enable ADCINT2 AdcRegs.INTSEL1N2.bit.INT2CONT = 0; // disable ADCINT1 continuous mode AdcRegs.INTSEL1N2.bit.INT2SEL = 0; // setup EOC1 to trigger ADCINT2 AdcRegs.ADCSOC0CTL.bit.CHSEL = 0; // set SOC0 channel select to ADCINA0 AdcRegs.ADCSOC1CTL.bit.CHSEL = 8; // set SOC1 channel select to ADCINB0 AdcRegs.ADCSOC0CTL.bit.TRIGSEL = 5; // set SOC0 start trigger on EPWM1A, due to round-robin SOC0 converts first then SOC1 AdcRegs.ADCSOC1CTL.bit.TRIGSEL = 5; // set SOC1 start trigger on EPWM1A, due to round-robin SOC0 converts first then SOC1 AdcRegs.ADCSOC0CTL.bit.ACQPS = 6; // set SOC0 S/H Window to 7 ADC Clock Cycles, (6 ACQPS plus 1) AdcRegs.ADCSOC1CTL.bit.ACQPS = 6; // set SOC1 S/H Window to 7 ADC Clock Cycles, (6 ACQPS plus 1) EDIS; /* configure GPIO */ InitGpio(); // [F2806x_Gpio.c] EALLOW; GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; // GPIO34 = I/O pin GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // GPIO34 = output GpioDataRegs.GPBSET.bit.GPIO34 = 1; // GPIO34 = 1 GpioCtrlRegs.GPBMUX1.bit.GPIO39 = 0; // GPIO39 = I/O pin GpioCtrlRegs.GPBDIR.bit.GPIO39 = 1; // GPIO39 = output GpioDataRegs.GPBCLEAR.bit.GPIO39 = 1; // GPIO39 = 0 EDIS; /* initialise controller variables */ pid1.Kp = 9.0f; pid1.Ki = 0.015f; pid1.Kd = 0.35f; pid1.Kr = 1.0f; pid1.c1 = 188.0296600613396f; pid1.c2 = 0.880296600613396f; pid1.d2 = 0.0f; pid1.d3 = 0.0f; pid1.i10 = 0.0f; pid1.i14 = 1.0f; pid1.Umax = 1.0f; pid1.Umin = -1.0f; rk = 0.25f; // initial value for control reference lk = 1.0f; // control loop not saturated /* enable interrupts */ PieCtrlRegs.PIEIER1.bit.INTx1 = 1; // enable PIE INT 1.1 (ADCINT1) - [adcisr] IER |= M_INT1; // enable core interrupt 1 (ADC) - [control_isr] SetDBGIER(0x0001); // enable real-time debug interupts EINT; // enable global interrupt mask EALLOW; EPwm1Regs.TBCTL.bit.CTRMODE = 0; // PWM1 timer: count up and start EDIS; /* idle loop */ while(1) { IdleLoopCount++; // increment loop counter asm(" NOP"); } // while } // main /* control ISR: triggered by ADC EOC */ interrupt void control_Isr(void) { PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; // read ADC channel yk = ((float) AdcResult.ADCRESULT0 - 2048.0f) / 2047.0f; // run PID controller uk = DCL_runPID_C4(&pid1, rk, yk, lk); // external clamp for anti-windup reset clampactive = DCL_runClamp_C1(&uk, upperlim, lowerlim); lk = (clampactive == 0U) ? 1.0f : 0.0f; // write u(k) to PWM Duty = (uk / 2.0f + 0.5f) * (float) EPwm1Regs.TBPRD; EPwm1Regs.CMPA.half.CMPA = (Uint16) Duty; IsrCount++; } /* end of file */
社区成员、请提供解决问题的建议。
此致
阿尔萨兰