Other Parts Discussed in Thread: TMS320F280025, TIDM-02010, MOTORWARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025 主题中讨论的其他器件: TIDM-02010、 MOTORWARE
尊敬的支持团队:
我正在使用我自己的电机和 DRV8353RS、3个分流器和 TMS320F280025 lanch pad。
电机运行正常、我只是在快速启动期间有一个小问题。
我使用 SDK 4_02_01_00中的通用电机控制实验。
如前所述、这些参数已设置:
obj->flagEnableFlyingStart = true;
obj->flyingStartTimeDelay =(uint16_t)(objUser->ctrlFreq_Hz * 0.5f);// 0.5s
#define USER_MOTOR1_SPEED_FS_Hz (3.0F)
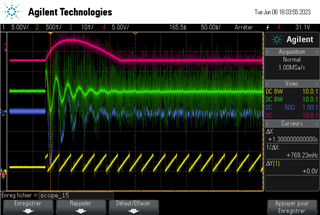
在快速启动期间、发生过压(28V 电源约为10V)、请参阅以下内容:
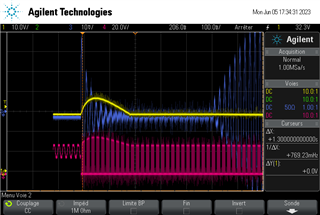
黄色:直流电压
蓝色:电机中的电流(10mV=500mA)
粉色:MOT B 电压
如您所见、当标志 motorVars_M1.flagEnableRunAndIdentify 设置为1时、电流在调节为0之前需要几 ms、在此期间、直流电压会过冲
然后在0.5秒之后、电机按预期加速。
不启用偏移计算。
我想到的是电流调节器设定点设置不正确的情况。
我尝试增加快速启动延迟、但只是延迟电机加速时的时间、过冲是相同的。
您能帮助我减少这个过压吗?
谨致问候