请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:C2000WARE-MOTORCONTROL-SDK 您好!
我是 尝试运行 is04_signal_chain_test_eabi 来自 MotorControl SDK 中提供 版本4.02.01。 到目前为止、我已经能够使用 is03_signal_chain_test_eabi 在开环中使电机旋转。
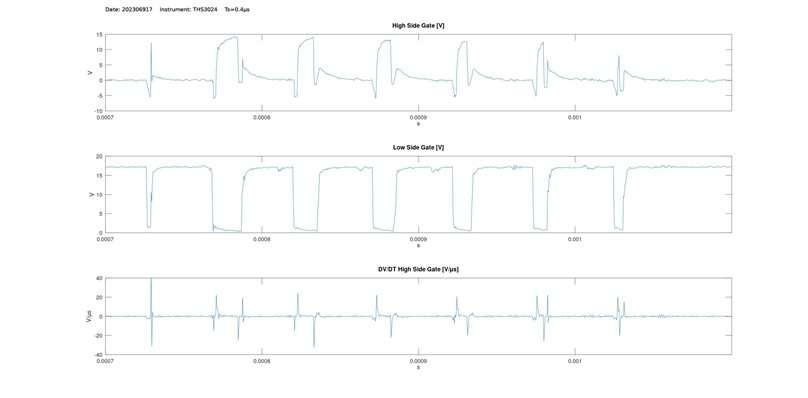
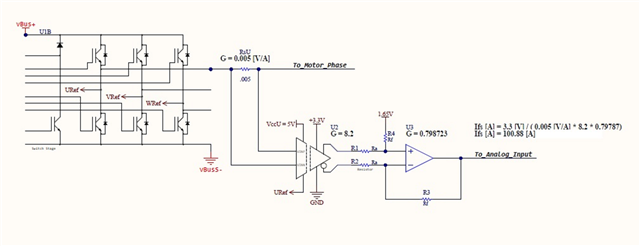
假设、 电压和电流反馈参数是正确的。 PWM 信号以20kHz 的频率运行、死区时间为2.5µs μ s。 栅极电压的 µs dV/dt 目前约为20V/μ s。
在给定所有这些条件的情况下、当我尝试使用 is04_signal_chain_test_eabi 来旋转电机时、 电机会发出咔嗒声、但不会启动。 为 IGBT 栅极驱动、 进入保护模式并关断栅极。
我的假设是、在发生故障时、高侧 PWM 信号的占空比太短、栅极电压绝不会超过最小开关电压、而高侧 IGBT 绝不会导通。 IGBT 栅极驱动器检查 IGBT 的 VCE。 由于 VCE 在指定时间后不会下降(VCE 在250ns 后应降至9V 以下)、驱动器将检测到短路情况并关闭输出。
您能给我一些关于当前情况的见解吗? 是否有任何机制来控制 PWM 信号的占空比? PI 控制器是否已经饱和? 如何检查 PI 控制器是否饱和?
作为参考、这些是栅极电压。 IGBT 阈值电压为6.5V。