

主题中讨论的其他器件:SysConfig
我希望通过 CMPSS ePWM CBC 跳匣区域控制功能实现死区延迟。
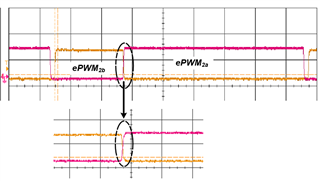
但当发生 TripZone 时、epwm2b 被强制为低电平、epwm2a 被强制为高电平(此时、我希望 epwm2a 上升沿延迟约为80ns)。
我知道正常的死区功能在这里不起作用。
参考:(e2e.ti.com/.../tms320f28384s-one-question-of-epwm-trip-zone-submodule)
因此、我将使用谷底开关功能、但它不起作用。 (其工作方式与下图类似)

示波器记录的波形。
有人能指导我吗?
我编写的代码是:
空 main (void)
{
InitSysCtrl ();//初始化器件时钟和外设
InitGpio();//初始化 GPIO
dint;//禁用 CPU 中断
InitPieCtrl ();//将 PIE 控制寄存器初始化为默认状态。
//禁用 CPU 中断并清除所有 CPU 中断标志:
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();//使用指向 shell 中断的指针初始化 PIE 向量表
setup1GPIO ();//用于启用 GPIO 的用户特定代码
// ADC (A4) CMPSS (CMP2)被选择(编号1415)
EALLOW;
AnalogSubsysRegs.CMPHPMXSEL.bit.CMP2HPMXSEL = 0;//IA-A4
EDIS;
//映射 ISR 函数
EALLOW;
PieVectTable.ADCA1_INT =&adcA1ISR;// ADCA 中断1的函数
EDIS;
initADC ();//配置 ADC 并启动
initEPWM1 (a);//配置 ePWM1
initEPWM2 (a);//配置 ePWM2
initEPWM3 (a);//配置 ePWM2
initADCSOC ();//在通道1上为 ePWM 触发的转换设置 ADC
CMPSSInit ();// CMPSS 已初始化。
XBARInit ();// XBAR 函数调用
//启用全局中断和更高优先级的实时调试事件:
IER |= M_INT1;//启用组1中断
EINT;//启用全局中断 INTM
ERTM;//启用全局实时中断 DBGM
PieCtrlRegs.PIEIER1.bit.INTx1 = 1;//启用 PIE 中断
//同步 ePWM
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1;
//在循环中无限地进行转换
while (1)
{
//
//启动 ePWM
//
EPwm1Regs.ETSEL.bit.SOCAEN = 1;//启用 SOCA
EPwm1Regs.TBCTL.bit.CTRMODE = 0;//解冻、并进入向上计数模式
////空闲循环。 只需永久坐下并循环(可选):
////
for (;;)
{
__ asm (" NOP");
}
}
}
void initEPWM2 (UINT16周期)
{
EALLOW;
EPwm2Regs.TBPRD = a;//设置计时器周期
EPwm2Regs.TBPHS.bit.TBPHS = 0x0000;//相位为0
EPwm2Regs.TBCTR = 0x0000;
EPwm2Regs.TBCTL.bit.FREE_SOFT = 3;
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE;//禁用相位加载
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;//时钟与 SYSCLKOUT 的比率
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.SYNCOSEL=TB_CTR_ZERO;
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;//递增/递减计数
EPwm2Regs.TBCTL.bit.PRDLD = TB_shadow;
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_HOLD;//每0加载一次寄存器
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_影子;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;// page.264
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm2Regs.DBCTL.bit.out_mode = DB_FULL_ENABLE;//启用死区模块
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;//高电平有效互补模式(输出反相)
// EPwm2Regs.DBRED.bit.DBRED = DB;
EPwm2Regs.DBFED.bit.DBFED = DB;
//通过以下代码行,将 DB 延迟设置为 epwmB。
EPwm2Regs.CMPB.bit.CMPB = A-1;//设置比较
EPwm2Regs.AQCTLA.bit.CBU = AQ_SET;
EPwm2Regs.CMPA.bit.CMPA = A;
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;//AQ_CLEAR
// DCAH =比较器2输出
// DCAEVT2 = DCAH HI (将随着比较器输出变为 HI)>>>用于 epmwA
EPwm2Regs.DCTRIPSEL.bit.dCAHCOMPSEL = DC_TRIPIN4;//(页。 1980年)
EPwm2Regs.TZDCSEL.bit.dCAEVT2 = TZ_DCAH_HI;
EPwm2Regs.DCACTL.bit.EVT2SRCSEL = DC_EVT_FLT;// DCAEVT2 = DCAEVT2 (未滤波) DC_EVT2
EPwm2Regs.DCACTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;//获取异步路径
EPwm2Regs.TZSEL.bit.dCAEVT2 = 1;
EPwm2Regs.TZCTL.bit.tZA = TZ_FORCE_HI;// EPWM1A 将变为低电平
//谷底开关。
//第1步。
EPwm2Regs.DCFCTL.bit.SRCSEL = 1;//数字滤波器输入源为 DCAEVT2。 (第1984号编)
//第2步。
EPwm2Regs.DCFCTL.bit.EDGEMODE = 0;// 0 =选择低边沿到高边沿(页号:1983)
// 1 =高到低
// 2 =两者
EPwm2Regs.DCFCTL.bit.EDGEUNT = 0;//更改值以验证(P.NO.1983)
//第3步。
EPwm2Regs.VCAPCTL.bit.TRIGSEL = 5;//捕获序列由 DCAEVT2事件触发。 (第1905号编)
//第4步。
EPwm2Regs.VCAPCTL.bit.VCAPE = 1;//启用谷底捕捉
//第5步。
EPwm2Regs.VCNTCFG.bit.STARTEDGE = 2 //(P.No.、
//第6步。
EPwm2Regs.VCNTCFG.bit.STOPEDGE = 3;//该值必须大于起始边沿。
//第7步。
EPwm2Regs.VCAPCTL.bit.VDELAYDIV =1;//HWVDELVAL = SWVDELVAL (P.NO.1905)
EPwm2Regs.SWVDELVAL = 5;//
//步骤8。
EPwm2Regs.VCAPCTL.bit.EDGEFILTDLYSEL = 1;//应用硬件谷值延迟(P.NO.1905)
// EPwm2Regs.HWVDELVAL = 5;//硬件谷底延迟值寄存器
//选择
EPwm2Regs.DCFCTL.bit.EDGEFILTSEL = 1;//数字滤波器(P.No.1984)
// DCAEVT2 = DCAH HI (将随着比较器输出变为 HI)>>>用于 epmwA
EPwm2Regs.DCTRIPSEL.bit.dCBHCOMPSEL = DC_TRIPIN4;
EPwm2Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_HI;
EPwm2Regs.DCBCTL.bit.EVT2CSEL = DC_EVT2;// DCAEVT2 = DCAEVT2 (未滤波)
EPwm2Regs.DCBCTL.bit.EVT2FRCSYNCSEL = DC_EVT_ASYNC;//获取异步路径
EPwm2Regs.TZSEL.bit.DCBEVT2 = 1;
EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO;// EPWM1B 将变为高电平
//启用 TZ 中断
EPwm2Regs.TZEINT.bit.CBC = 1;
EPwm1Regs.TZCLR.bit.INT = 1;
EDIS;
}
__interrupt void adcA1ISR (void)
{
//
//将最新结果添加到缓冲区中
// ADCRESULT0是 SOC0的结果寄存器
V_out = AdcaResultRegs.ADCRESULT0*3.3/4095;
V_IN = AdccResultRegs.ADCRESULT0*3.3/4095;
V1 = AdccResultRegs.ADCRESULT0*3.3/4095*30;//数字表单
// DACAL 值随负载电流而变化
Cmpss2Regs.DACHVALS.bit.DACVAL = 2500;// CMPSS DACVAL
EPwm2Regs.TBPRD =(a + b);
//清除中断标志
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
//检查是否发生了溢出
if (1 == AdcaRegs.ADCINTOVF.bit.ADCINT1)
{
AdcaRegs.ADCINTOVFCLR.bit.ADCINT1 = 1;//清除 INT1溢出标志
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;//清除 INT1标志
}
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;//确认中断
}
void CMPSSInit (void){
EALLOW;
///CMP2_H、用于 IL 电流检测
Cmpss2Regs.COMPCTL.bit.COMPDACE = 1;启用//Comparator/DAC
Cmpss2Regs.COMPCTL.bit.ASYNCHEN = 0;//不馈入或门
Cmpss2Regs.COMPHYSCTL.bit.COMPHYS = 1;
//// 滤波器功能
Cmpss2Regs.CTRIPHFILCTL.bit.SAMPWIN = 4;
Cmpss2Regs.CTRIPHFILCTL.bit.THRESH = 2;
Cmpss2Regs.CTRIPHFILCLKCTL.bit.CLKPRESCALE = 0;
Cmpss2Regs.CTRIPHFILCTL.bit.FILINIT = 1;
Cmpss2Regs.COMPSTSCLR.bit.HLATCHCLR = 1;
//// CTRIPOUTH = CLBX-BAR 输入
Cmpss2Regs.COMPCTL.bit.CTRIPOUTHSEL = 2;//同步比较器输出驱动 CTRIPOUTH
Cmpss2Regs.COMPCTL.bit.CTRIPHSEL = 2;//同步比较器输出驱动 CTRIPH
Cmpss2Regs.COMPCTL.bit.COMPHINV = 0;//比较器的输出未反相
Cmpss2Regs.COMPCTL.bit.COMPHSOURCE = 0;//内部 DAC 驱动的比较器的反相输入
//// 选择 DACVAL 源。
Cmpss2Regs.COMPDACCTL.bit.SWLOADSEL = 0;//DACxVALA 在 SYSCLK 上从 DACxVALS 更新
Cmpss2Regs.COMPDACCTL.bit.DACSOURCE = 0;//DACHVALA 从 DACHVALS 更新
EDIS;
}
void XBARInit (void){
EALLOW;
//配置 EPWM_XBAR (页号1029)
//TRIP4、用于 OVP/OVP TRIG
EPwmXbarRegs.TRIP4MUX0TO15CFG.bit.MUX2 = 0;//配置为 CMPSS2 CTRIPH
EPwmXbarRegs.TRIP4MUXENABLE .bit.MUX2 = 1;// Trip4 ePWM XBAR 多路复用器使能
//编写下面的代码行以查看 CMPSS 值
//配置 OUTPUT_XBAR3 GPIO5
//配置 OUTPUTXBAR3 = CMP2_H
OutputXbarRegs.OUTPUT1MUX0TO15CFG.bit.MUX2 = 0;//CMPSS2.CTRIPOUTH
OutputXbarRegs.OUTPUT1MUXENABLE。bit.MUX2 = 1;
// OutputXbarRegs.OUTPUT6MUX0TO15CFG.bit.MUX2 = 0;// CMPSS2.CTRIPOUTH
// OutputXbarRegs.OUTPUT6MUXENABLE.bit.MUX2 = 1;
EDIS;
}
