主题中讨论的其他器件:LAUNCHXL-F280049C、 BOOSTXL-DRV8320RS
您好!
我正在尝试验证电流检测和栅极驱动是否正确。
我已验证 ADC 正在测量其接收的电流、也就是说、在电阻负载上、如果分流器的电流为1安培、那么 F280037C 会看到与1安培相关的运算放大器的反馈。
我已经验证了失调电压校准级、因此它将电流集中在零上(尽管它有点噪声、+/- 0.4A、似乎是降压转换器开关噪声)。
我已验证 PWM 正切换到"HAL_writePWMData"命令的值、并且已将栅极上的死区配置为比 MOSFET 的 ON/OFF 开关时间之和稍长。
我已经在使用开环控制的评估套件(LAUNCHXL-F280049C)上验证了该电机、它可以缓慢且安静地旋转。 我将 InstaSPIN 实验确定的电机变量导出到通用电机控制实验室参数、尤其是开环控制变量:
#define USER_MOTOR_FREQ_MIN_Hz (10.0)// Hz
#define USER_MOTOR_FREQ_MAX_Hz (500.0)// Hz
#define USER_MOTOR_FREQ_LOW_Hz (20.0)// Hz
#define USER_MOTOR_FREQ_HIGH_Hz (450.0)// Hz
#define USER_MOTOR_VOLT_MIN_V (2.0)//伏特
#define USER_MOTOR_VOLT_MAX_V (24.0)//伏特
将系统设置为构建级别2、我希望系统行为类似、但电机会发出响亮的尖叫、抖动/旋转一个位、然后系统会抛出过流故障并停止。
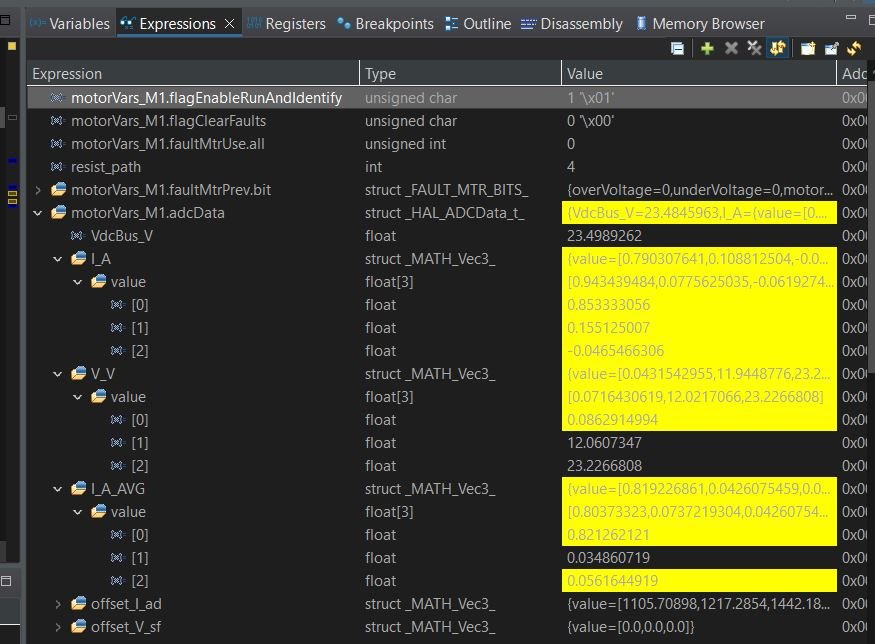
昨天、我设置了数据日志以更好地了解系统。 (编辑:澄清了)数据记录似乎正确显示了 ADC 读数、但可能不是开环角度发生器。
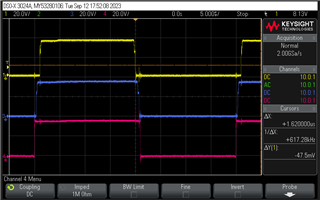
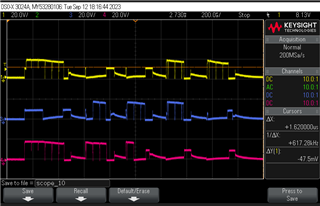
来自我的自定义板(此时电机仍然静止、 运行标志设置为0、因为它不会旋转)
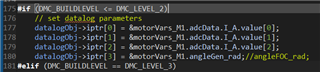
左上角:A 相电流反馈。
右上角:B 相电流反馈。
左下方:C 相电流反馈。
右下角:angleGen_rad
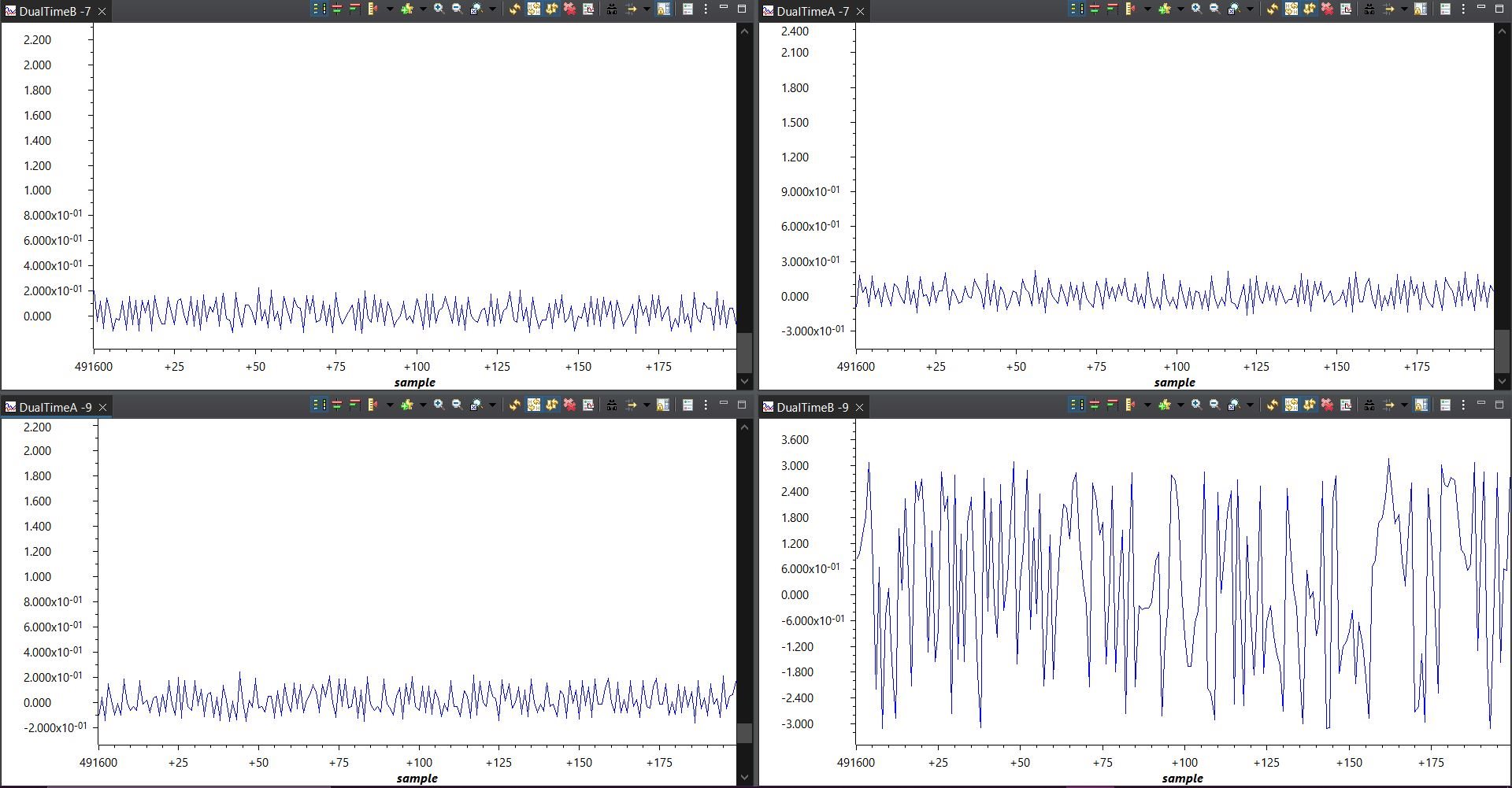
角度发生器图形看起来像垃圾、只不过它在-pi 至+pi 范围内的精度是正确的
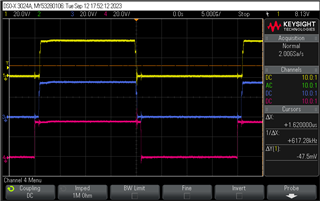
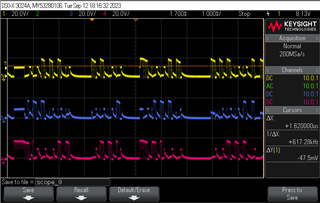
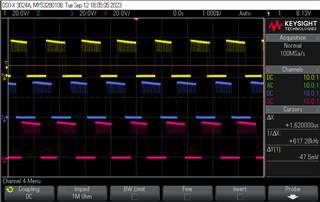
与评估套件相比(类似的设置、运行标志设置为0以进行比较):
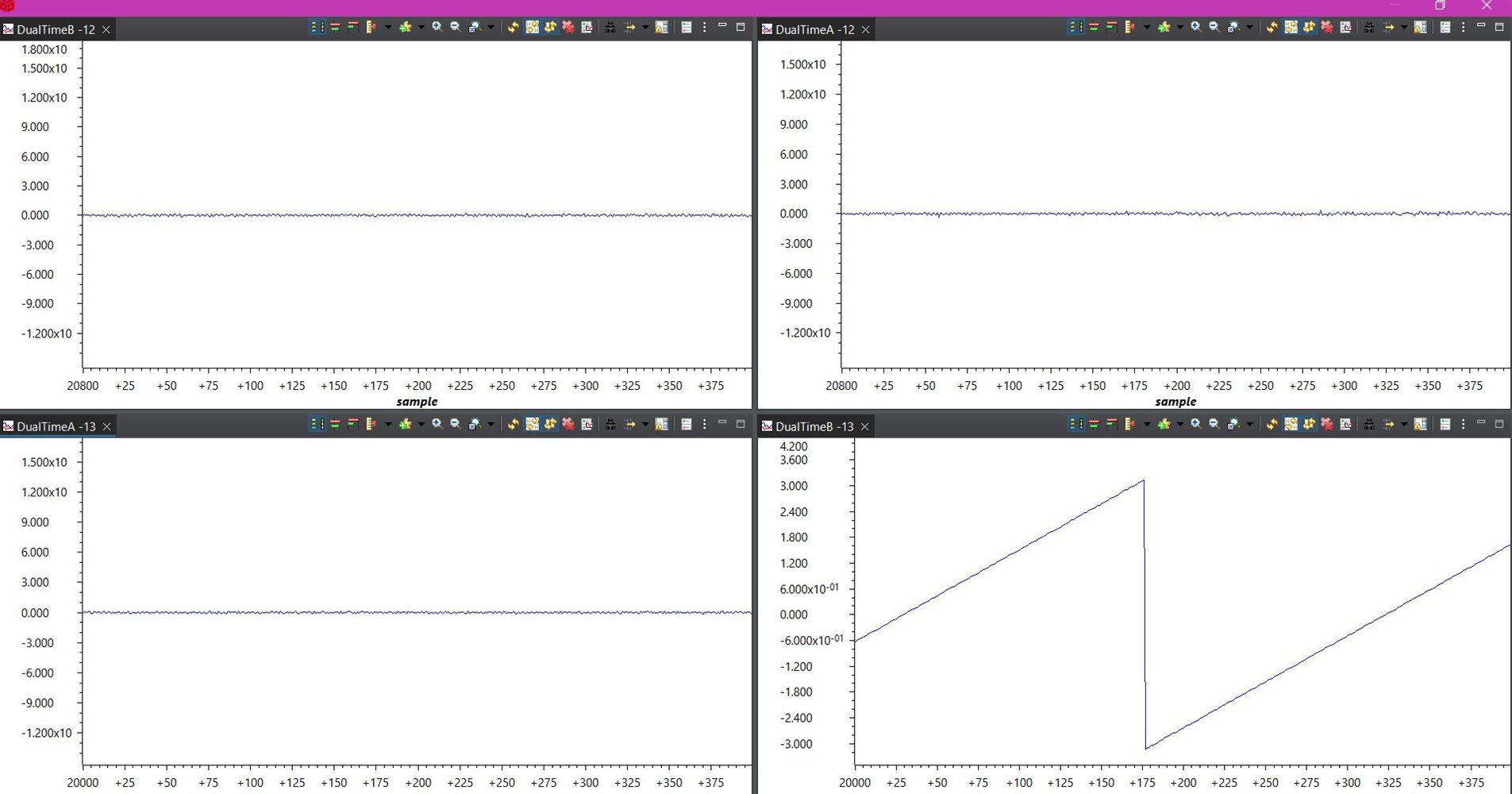
会发生什么情况?
如何在电路板上使电机旋转?