请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSCNCD28P65X 大家好!
我正在尝试为 TMDSCNCD28P65X 控制卡配置 ePWM 模块、但 ePWM 同步存在一些问题。 我已按如下方式调用了已配置的 ePWM 1和 ePWM 2:
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
EPwm1_Init ();
EPWM2_Init();
EPWM3_Init ();
EPwm5_Init ();
EPwm18_Init ();
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
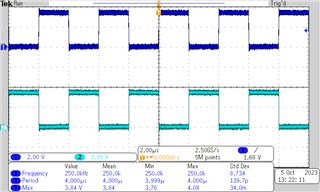
但是、两个模块之间存在约20n 秒的相位延迟。 请注意、我已为 ePWM 1和 EMPW 2启用相位寄存器并将其设置为零。 为了规避此问题、我已将 EMDW 18配置为用作 ePWM 1和 EMPM 2的时钟源、在本例中、1&2均会同步。 我想了解为什么 TBCLKSYNC 不会 同步 ePWM 模块。