请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800137 主题中讨论的其他器件:SFRA、 C2000WARE
您好!
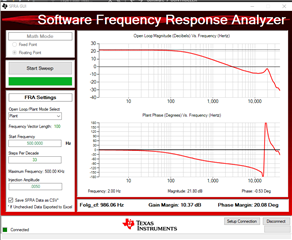
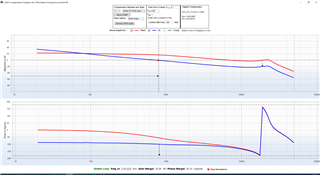
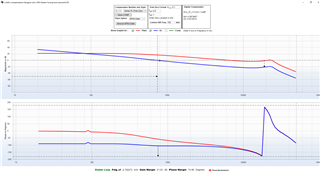
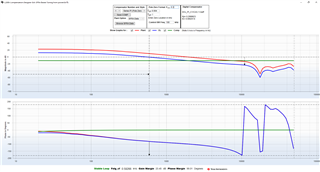
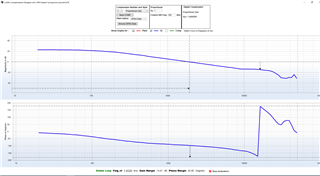
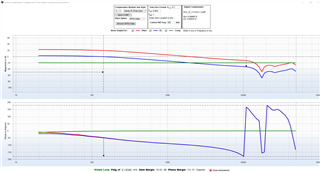
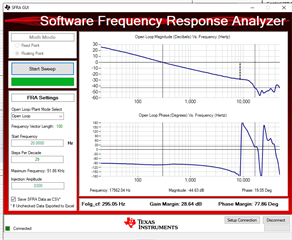
可以将 SFRA GUI 成功连接至电路板、当按下 Start Sweep 按钮时、SFRA 会卡在以下模式下:
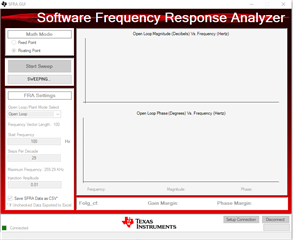
同时直流注入采取了行动、我可以(使用示波器)看到 PWM 正在发生变化。
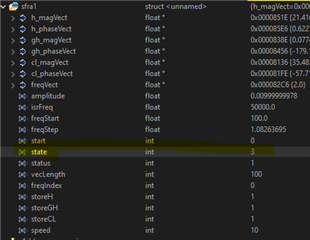
它看起来状态不在进行。
我使用以下后台函数:
SFRA_F32_runBackgroundTask (&sfra1);
SFRA_GUI_runSerialHostComms (&sfra1);
但我甚至不能对此进行调试、看看状态为什么不会开启。
感谢您的帮助。