尊敬的 Champ:
我想就我当前面临的问题征求您的意见。 我的应用使用两个 PWM 模块、PWM1和 PWM2。 相位在 PWM2上启用、PWM1作为 SYNCIN (主器件)。
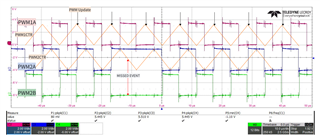
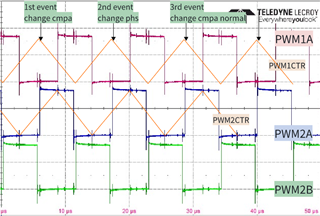
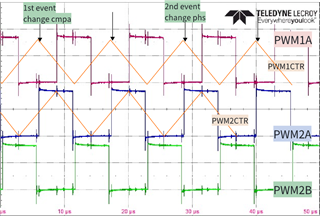
当相位在 CMPA 值附近缓慢下降时、就会出现问题。 我观察到 PWM2在一个周期内跳过。 根据我在此处找到的一些帖子、建议的解决方案是处理相位更新、方法是在一个周期内将 CMPA 值更改为小于 TBPHS、然后在下一个周期将 CMPA 改回正常值。
但是,这种方法(*)不能解决本例中的问题。 是否有需要添加的特定设置或处理程序?
我在这里附上了我的代码供您参考。
void PWM_init(void){
EPwm1Regs.TBPRD = pwm_prd;
EPwm1Regs.TBPHS.bit.TBPHS = 0; // PWM-1 serves as reference
EPwm1Regs.CMPA.bit.CMPA = pwm_cmpa;
EPwm1Regs.CMPB.bit.CMPB = 0;
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //change to sysclk
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Symmetrical mode
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm1Regs.EPWMSYNCOUTEN.bit.ZEROEN = 1;
EPwm1Regs.EPWMSYNCINSEL.bit.SEL = SYNC_IN_SRC_DISABLE_ALL;
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.AQCTLA.bit.CAD = AQ_SET; // Active high
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CAD = AQ_CLEAR; // Active LOW
EPwm1Regs.AQCTLB.bit.CAU = AQ_SET;
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // Enable Dead-band module
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm1Regs.DBFED.bit.DBFED = Deadtime;
EPwm1Regs.DBRED.bit.DBRED = Deadtime;
EPwm2Regs.TBPRD = pwm_prd;
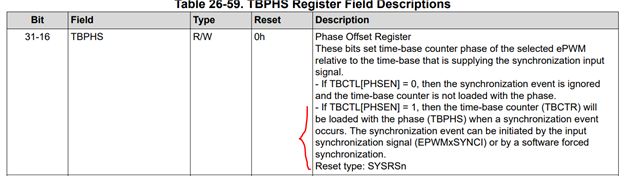
EPwm2Regs.TBPHS.bit.TBPHS = pwm_phs;
EPwm2Regs.CMPA.bit.CMPA = pwm_cmpa;
EPwm2Regs.CMPB.bit.CMPB = 0;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1;
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE;
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm2Regs.EPWMSYNCINSEL.bit.SEL = SYNC_IN_SRC_SYNCOUT_EPWM1;
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_IMMEDIATE;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_IMMEDIATE;
// EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO_PRD; // load on CTR=Zero
// EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO_PRD; // load on CTR=Zero
EPwm2Regs.AQCTLA.bit.CAD = AQ_CLEAR; //Active LOW
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET;
EPwm2Regs.AQCTLB.bit.CAD = AQ_SET; //Active HIGH
EPwm2Regs.AQCTLB.bit.CAU = AQ_CLEAR;
EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; // Enable Dead-band module
EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; // Active Hi complementary
EPwm2Regs.DBFED.bit.DBFED = Deadtime;
EPwm2Regs.DBRED.bit.DBRED = Deadtime;
EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE;
}
void phase_update(uint16_t phase)
{
static uint16_t temp;
temp = (uint16_t)(((uint32_t)phase* EPwm1Regs.TBPRD) / 180);
pwm_phs = temp;
update_request = 1;
}
void PWMUpdate(void)
{
if (skip_pwm_flag == 1) {
EPwm2Regs.TBPHS.bit.TBPHS = pwm_phs;
pwm_phs_prev = EPwm2Regs.TBPHS.bit.TBPHS;
skip_pwm_flag++;
} else if (skip_pwm_flag == 2) {
EPwm2Regs.CMPA.bit.CMPA = (EPwm2Regs.TBPRD >> 1);
skip_pwm_flag = 0;
}
if (update_request == 1) {
update_request = 0;
if (pwm_phs_prev > EPwm2Regs.CMPA.bit.CMPA && pwm_phs <= EPwm2Regs.CMPA.bit.CMPA) {
EPwm2Regs.CMPA.bit.CMPA = pwm_phs - 1;
skip_pwm_flag = 1;
} else {
EPwm2Regs.TBPHS.bit.TBPHS = pwm_phs;
pwm_phs_prev = EPwm2Regs.TBPHS.bit.TBPHS;
}
}
}
E2E 参考(*)
https://e2e.ti.com/support/microcontrollers/c2000-microcontrollers-group/c2000/f/c2000-microcontrollers-forum/1163045/tms320f28069-epwm-miss-cycle-while-tbphs-change?tisearch=e2e-sitesearch&keymatch=tbphs%2525252525252520cmpa%2525252525252520pwm%2525252525252520missed#
https://e2e.ti.com/support/microcontrollers/c2000-microcontrollers-group/c2000/f/c2000-microcontrollers-forum/1161072/tms320f28033-when-tbphs-load-value-is-less-than-cmpa-value-the-below-figure-will-the-aq-action-be-lost