

Other Parts Discussed in Thread: DRV8353, DRV8353RS-EVM
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F2800157 主题中讨论的其他器件:DRV8353RS-EVM、DRV8353
大家好!
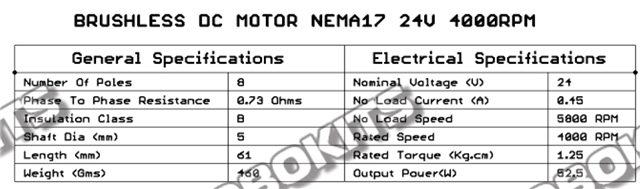
我将利用 LAUNCHXL-F2800025C 和 DRV8353RS-EVM 完成通用电机控制实验。
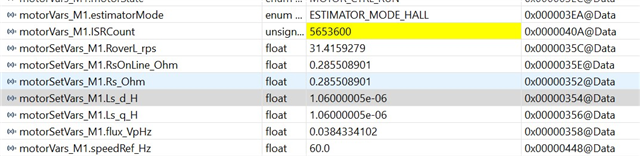
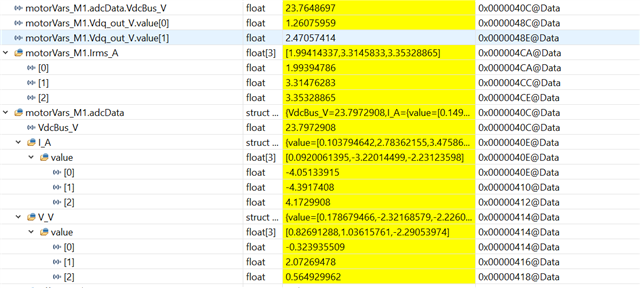
我参考 F280025c 代码并配置 F2800157和 DRV8353RS-EVM 模块。
输入但电压: 24V,
电机:基于霍尔传感器的24V, BLDC。
您能否回顾一下我们的项目、它将帮助您理解我们缺少什么?
非常感谢任何帮助。 提前感谢。
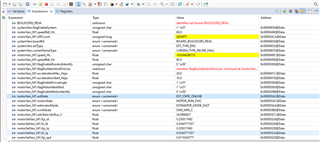
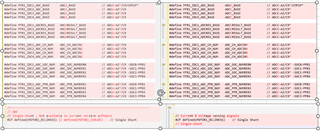
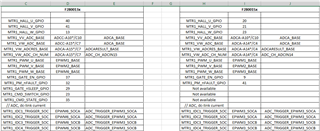
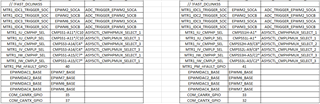
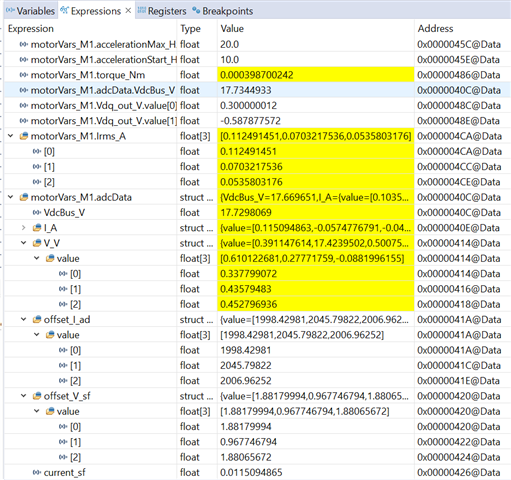
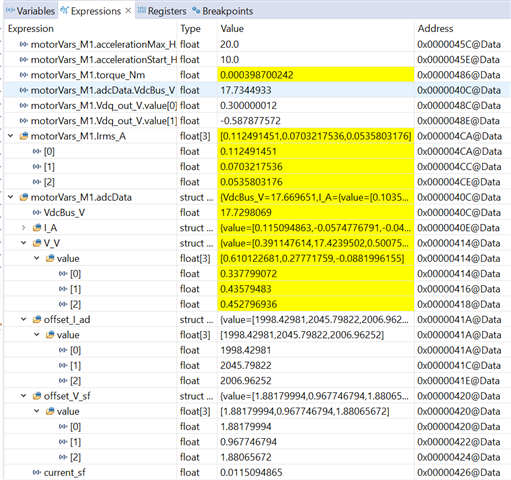
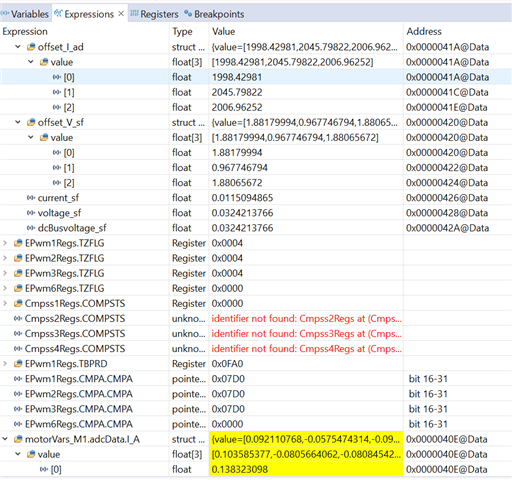
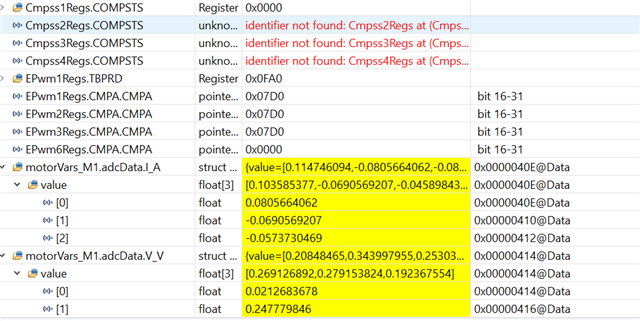
请找到附件引脚配置和调试器表达式。
谢谢。
Premkumar.T

{kind=link}