请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28335 我们 尝试在 F28335器件中进行 SPI 通信、并将数据从 TMS320F28335 SPI (主器件)发送到 Holt 集成电路 HI-35850 (从器件)器件板的外部从器件。
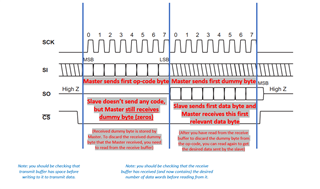
这里、我们已将 TMS320F28335 SPI 器件配置为主器件、将 HI-35850配置 为从器件。
- 为此、我们 尝试发送32位乘4迭代的 Arinc 数据、因为我们已将 SPICCR.bit.SPICHAR 配置为8位字。
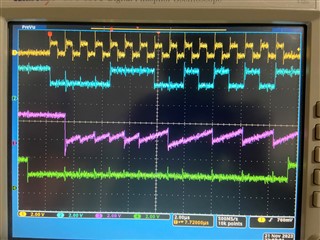
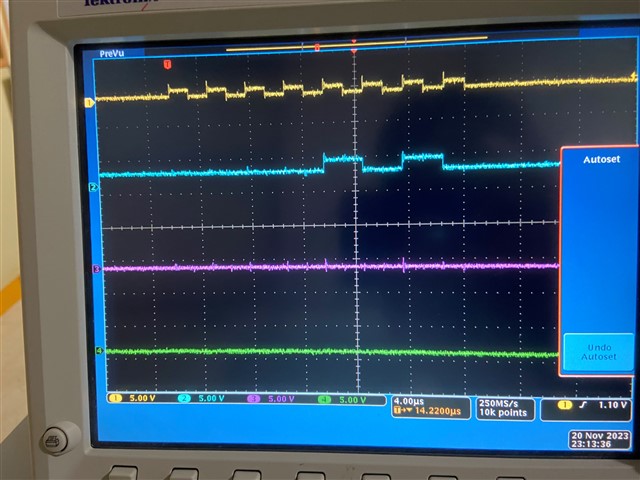
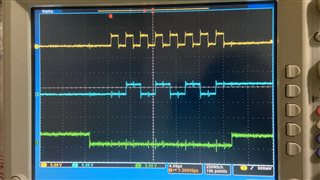
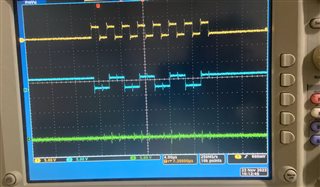
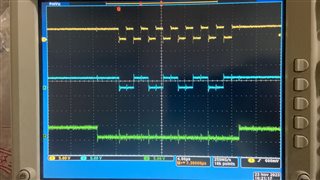
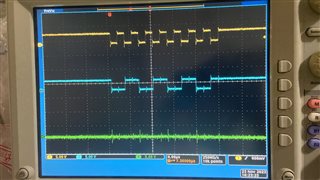
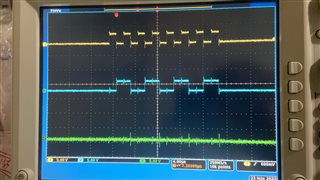
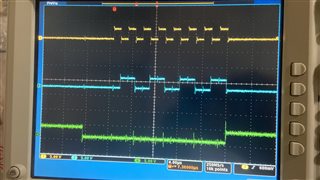
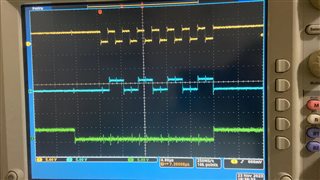
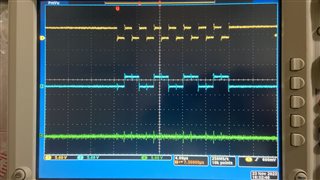
- 我们以附件形式捕获并附加了采用 SCLK、MISO、MOSI 和 CS 的4通道 CRO 波形。 但我们无法在波形中看到超过16个时钟、并且芯片选择(CS)被取消置位、但32位需要32个时钟、我们需要您的支持。
- 为此、我在下面附上了我的 SPI C 代码、以及模块名称 Mcu1_SPI_initialization( )中的初始化和配置。
#include "Mcu1_Device.h"
#include "Mcu1_Timer.h"
#include "stdio.h"
#include "Mcu1_Arinc429.h"
#include "Mcu1_spi.h"
#include "Mcu1_Arinc429_spi.h"
空 main (void)
{
//初始化系统控制:PLL、看门狗
InitSysCtrl();
//禁用 CPU 中断
Dint;
GPIO_init ();
InitPieCtrl();
/*禁用所有中断并清除所有中断标志:*/
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
/*初始化 GPIO 引脚*/
InitSpiaGpio();
/*调用 SPI 初始化*/
mcu1_spi_initialization();
/* j 表示索引增量*/
UNS8j = 0;
/* Tx 数据变量*/
UNS8Tdata = 0;
SpiaRegs.SPITXBUF = 0x1000;
SpiaRegs.SPITXBUF = 0x2000;
SpiaRegs.SPITXBUF = 0x2000;
for (j=0;j<=19;j++)
{
SpiaRegs.SPITXBUF = 0x0E00;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
Tdata = SpiaRegs.SPITXBUF;
printf ("传输的数据:0x%X\n"、Tdata);
}
}
void InitSpiaGpio()
{
EALLOW;
/*为 GPIO16、GPIO17、GPIO18和 GPIO19启用上拉电阻*/
GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0; //(SPISIMOA)
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; //(SPISOMIA)
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; //(SPICLKA)
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; //(SPISTEA)
/* GPIO16、GPIO17、GPIO18和 GPIO19的异步输入*/
GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3;//(SPISIMOA)
GpioCtrlRegs.GPAQSEL2.GPIO17 = 3;//(SPISOMIA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3;//(SPICLKA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO19 = 3;// (SPISTEA)
/*配置多路复用器寄存器引脚 GPIO16、GPIO17、GPIO18和 GPIO19 */
GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 1;// SPISIMOA
GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 1;// SPISOMIA
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 1;// SPICLKA
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 1;// SPISTEA
EDIS;
}
void Mcu1_SPI_initialization()
{
EALLOW;
/*启用外设时钟*/
SysCtrlRegs.PCLKCR0.bit.SPIAENCLK = 1;
EDIS;
/* SPI 的配置*/
/ /
/* SPI 软件复位为0 */
SpiaRegs.SPICCR.bit.SPISWRESET = 0;
/* SPI 网络模式,作为主站*/
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1;
/*启用通话位以启用传输*/
SpiaRegs.SPICTL.bit.talk = 1;
/*时钟极性为0 */
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0;
/*时钟相位为0 */
SpiaRegs.SPICTL.bit.CLK_PHASE = 0;
/* SPI 波特率控制*/
SpiaRegs.SPIBRR = 0x27; // SPI_BRR
/* SPI 字符位到8位字*/
SpiaRegs.SPICCR.bit.SPICHAR = 0x7;
/*通过向该位输入1来清除溢出标志*/
SpiaRegs.SPISTS.bit.overrid_flag = 1;
/*将 SPIRSWRESET 设置为1 以将 SPI 从复位状态释放*/
SpiaRegs.SPICCR.bit.SPISWRESET = 1;
/ /
}
请查看我的波形和 SPI 代码附件。 好心建议我,有什么需要纠正。